ゲイン計算と調整
Motor Control Blockset は、電流、速度、および位置ループのコントローラー ゲイン (PI ゲイン) の選択と調整を支援します。ゲインは、モーターの電気的パラメーター (抵抗、インダクタンス、慣性) と各制御ループの目標帯域幅または応答時間から最初に計算されます。FOC では、電流ループ (d 軸および q 軸) は、適切なトルクおよび磁束制御を確保するために高速かつ十分に減衰している必要があるため、最初に調整されます。その後、速度ループのゲインは電流ループよりも遅くなるように調整され、安定したカスケード制御を実現します。適切なゲイン計算と調整は、振動、過大なトルク リップル、応答遅延、さらにはドライブの不安定性を回避するために極めて重要です。
関数
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (R2025a 以降) |
ブロック
トピック
- Estimate Control Gains and Tune Control Parameters
Perform control parameter tuning for speed and torque control subsystems.
- Obtain Controller Gains to Run Motor Using Field-Oriented Control
This example shows how to obtain PI controller gains using Optimum theory for the current control loop and speed control loop in Field Oriented Control (FOC) of a Permanent Magnet Synchronous Motor (PMSM).
注目の例

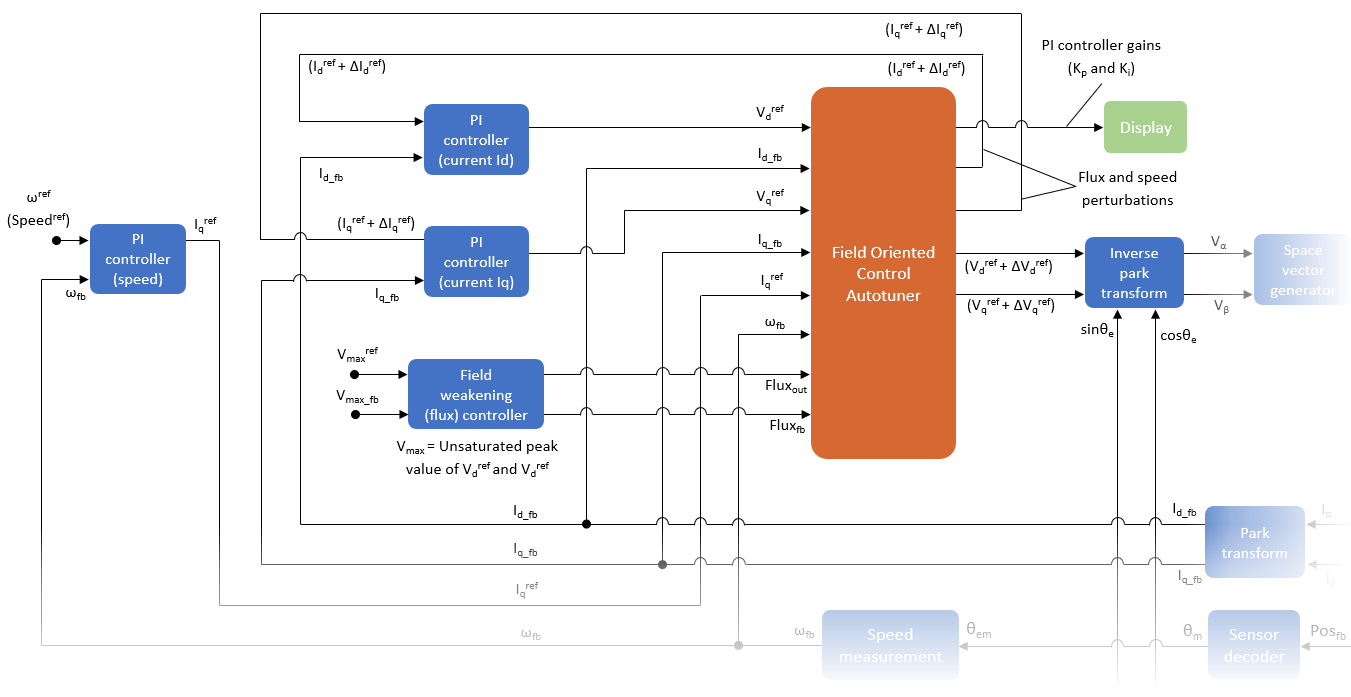
Tune PI Controllers Using Field Oriented Control Autotuner
Computes the gain values of PI controllers available in the speed and current control loops by using the Field Oriented Control Autotuner block. For details about this block, see Field Oriented Control Autotuner. For details about field-oriented control, see ベクトル制御.
Tune PI Controllers (in Field-Weakening Control Mode) Using FOC Autotuner Block
Uses the Field Oriented Control Autotuner block to compute the gain values of the PI controllers available in the speed, current, and flux control loops of a field-weakening control algorithm. For details about this block, see Field Oriented Control Autotuner.

Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block.