MATLAB Mobile でのセンサー データの収集
概要
データをモバイル デバイス センサーから MATLAB® Mobile™、MATLAB Online™、あるいはデスクトップまたはラップトップ コンピューターでの MATLAB セッションにストリーミングできます。MATLAB Mobile は WiFi 接続またはセルラー接続を使用して、MathWorks® Cloud で実行されている MATLAB にデータをリアルタイムで送信します。MATLAB、MATLAB Mobile、または MATLAB Online でセンサー データに対して MATLAB 操作を実行できます。これにより、MATLAB コマンド ライン インターフェイスでデバイス センサーを操作することができるようになります。デバイス上のセンサーに接続してデータを収集するには、MATLAB で mobiledev オブジェクトを作成します。
ネットワーク接続の有無にかかわらず、センサー データはモバイル デバイス上でローカルに取得することもできます。これは、デバイスからクラウドにストリーミングを行わずに、センサー データを収集する代替方法です。これは特に、デバイスにネットワーク接続がない場合にセンサー データを収集する際に役立ちます。この取得方法の使用例については、センサー データのローカルのログ記録を参照してください。
プロットの作成を含むさまざまな方法でセンサー データを処理するには、MATLAB を使用します。データを取得してプロットする例については、ログ記録されたセンサー データの処理を参照してください。
MATLAB、MATLAB Mobile、および MATLAB Online では、カメラにアクセスして、モバイル デバイスからイメージを取得することもできます。解像度、オートフォーカス、フラッシュなどのカメラのプロパティを設定できます。例については、モバイル デバイスのカメラからのイメージの取得を参照してください。取得したイメージの処理の例については、事前学習済みのネットワークを使用したモバイル デバイスのカメラからのイメージの分類を参照してください。
センサーを使用するための要件
MATLAB Mobile と共にモバイル デバイス センサーを使用するには、以下があることを確認してください。
モバイル デバイス上で MATLAB Mobile がインストールされていること。お使いのデバイスへの MATLAB Mobile のインストールを参照してください。
MathWorks Cloud にセンサー データのストリーミングまたはアップロードを行うには、MathWorks アカウントが必要です。アカウントがない場合は、MATLAB Mobile、MATLAB Online、または MathWorks アカウントの作成で設定できます。
デスクトップまたはラップトップ コンピューターの MATLAB からモバイル デバイス センサーにアクセスするには、次のサポート パッケージのうち、"お使いのデバイスに適した" ものが必要です。
MATLAB Support Package for Apple iOS Sensors
MATLAB Support Package for Android® Sensors
これらのサポート パッケージはアドオン エクスプローラーで入手できます。
MATLAB Mobile の [センサー] 画面
MATLAB Mobile で [センサー] 画面を開くには、メニューの [センサー] をタップします。
センサー表示の上部にセンサーの設定があります。センサーの設定を参照してください。
設定の下にセンサー表示があります。以下の順序で配置され、それらの測定値が表示されます。
マイク — サンプル レートおよび録音レベルを含むオーディオ データ。
加速度 —
X、Y、Z座標における加速度の読み取り値 (m/s2 (メートル毎秒毎秒) 単位)。磁場 —
X、Y、Z座標における磁場の読み取り値 (マイクロテスラ単位)。方向 —
X、Y、Z座標における方位角、ピッチ、ロールの位置の読み取り値 (度単位)。角速度 —
X、Y、Z軸回転における角速度の読み取り値 (ラジアン/秒単位)。位置 — 緯度、経度、速度、進路、高度、水平精度を表すデータ点。位置データは、GPS、Wi-Fi® またはセルラー ネットワークの中から、いずれか利用可能なものを使用して取得されます。測定値は以下を示します。
赤道を基準とした緯度 (度単位)。正の値は北緯を示します。
基準子午線を基準とした経度 (度単位)。正の値は東経を示します。
速度 (m/s (メートル毎秒) 単位)。
真北と基準とした進路 (度単位)。
海抜高度 (メートル単位)。
経度と緯度を中心とする円によって定義される水平精度 (メートル単位)。
トグル スイッチをタップして、各センサーのオンとオフを切り替えます。

センサーをオンにすると測定の読み取りが開始され、各センサーのセクションに表示されます。この例では、[加速度] と [磁場] がオンになっています。
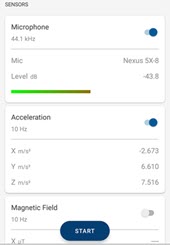
1 つ以上のセンサーをオンにした後、[開始] ボタンを使用してデータをログ記録します。代わりに MathWorks Cloud 上の MATLAB にデータを送信するには、センサーの設定に移動して [ストリーム先] 設定を変更します。モバイル デバイスの制御を使用したセンサー データのストリーミングを参照してください。
mobiledev オブジェクトの Logging プロパティを使用して、データ送信を MATLAB からプログラムによって開始することもできます。MATLAB オブジェクト プロパティを使用したセンサー データのストリーミングを参照してください。まずセンサーの設定で MATLAB のプログラムによるアクセスを有効にしなければなりません。
センサーの設定
デバイス上でのセンサー データの収集を管理するには、センサーの設定を使用します。センサー表示の前にセンサーの設定が表示されます。
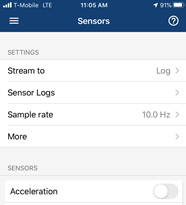
次のオプションがあります。
ストリーム先 — [MATLAB] (クラウド内) または [ログ] のいずれかを選択します。
センサー ログ
MATLAB Drive 上のログを表示 — MATLAB Drive™ にアップロードされたセンサー ログのリストを表示します。
設定 ([センサー] 、 [その他] からも使用できます)
センサー アクセス — MATLAB によるセンサーへのアクセスを制御します。センサーと、MATLAB からのデータ ストリーミングを制御するには、アクセスをオンのままにする必要があります。
カメラ — MATLAB によるカメラへのアクセスを制御します。このオプションは [センサー アクセス] が有効である場合に使用でき、MATLAB からのカメラ入力を制御するにはオンのままにしておく必要があります。
データをバックグラウンドで取得 (Android) — この設定は既定でオフですが、オンにすると、デバイス上でアプリケーションがバックグラウンドになってもセンサー データを送信し続けることができます。
位置データをバックグラウンドで送信 (iOS) — この設定は既定でオフですが、オンにすると、デバイス上でアプリケーションがバックグラウンドになっても位置データを送信し続けることができます。iOS のバックグラウンド取得は位置データのみに限定されます。
アップロード フォルダー — ログ ファイルのアップロード先のフォルダー。既定のフォルダーは
MATLAB Drive/MobileSensorDataです。この設定でアップロード フォルダーを変更できます。自動アップロード — この設定は、データ ログ ファイルを MATLAB Drive にアップロードする方法を決定します。
有効 — [自動アップロード] がオンで、デバイスにネットワーク接続がある場合、ログ ファイルは自動的に MATLAB Drive にアップロードされます。[自動アップロード] がオンで、ネットワーク接続がない場合、デバイスがネットワーク接続 (WiFi またはセルラー、選択した場合) を次に検出したときに、ファイルが自動的にアップロードされます。
無効 — [自動アップロード] がオフの場合、ファイルを MATLAB Drive に手動でアップロードしなければなりません。センサー ログの転送を参照してください。
デバイス上のログ — デバイス上のセンサー ログのリストを表示します。MATLAB Drive に正常にアップロードされたログには、正常時のクラウド アイコン
 が表示されます。ログ ファイルのアップロードに失敗した場合、失敗時のクラウド アイコン
が表示されます。ログ ファイルのアップロードに失敗した場合、失敗時のクラウド アイコン  が表示されます。
が表示されます。
サンプル レート — 加速度、磁場、方向および角速度のセンサーに適用するサンプル レートを入力します。
[その他] をタップすると、[センサー] 、 [センサー ログ] 、 [設定] で上記と同じオプションにアクセスできます。
デバイスの向き
加速度センサー、角速度センサー、磁場センサー、方向センサーはすべて、X、Y、Z 軸を基準としてデータをログ記録します。以下の図は、これらの軸とデバイスの関係を示しています。

デバイスが表面上に上向きで平らに置かれている場合、Z 軸は正の値となることに注意してください。これは設計によるものであり、MATLAB の規則と一致しています。デバイスが表面上に平らに置かれているとき、Z 軸に沿った加速度値は +9.81 であり、これはデバイスの加速度 (0 m/s^2) から重力の加速度 (-9.81 m/s^2) を引いた値に相当します。