空中に投げられたバトンの動きを表す方程式の求解
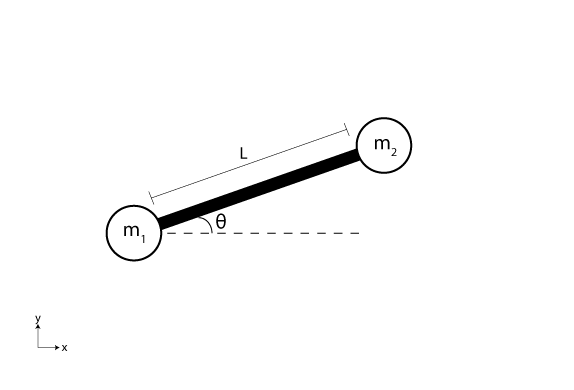
この例では、空中に投げられたバトンのダイナミクスをモデル化する連立常微分方程式を解きます [1]。バトンは、長さ のロッドで結合された質量 および の 2 つの質点としてモデル化されます。バトンは空中に投げられた後、重力の影響を受けながら、垂直な xy 平面内を移動します。ロッドは水平方向と の角度をもち、1 つ目の質点の座標は です。この定式化では、2 つ目の質点の座標は です。
このシステムの運動方程式は、3 つの座標 、、および それぞれに対しラグランジュ方程式を適用することで得られます。
方程式のコード作成
MATLAB では、 の形式で方程式を記述する必要があります。ここで、 は各座標の 1 階微分です。この問題では、解ベクトルに 、、角度 、およびそれらの 1 階微分という 6 つの要素があります。
この表記を使って、運動方程式全体を の要素によって書き換えることができます。
左辺に 1 階微分の項がいくつか存在するため、残念ながらこの運動方程式はソルバーが必要とする形式 に適合しません。こうした場合は、質量行列を使用して方程式の左辺を表現しなければなりません。
行列表記では、 の形式で質量行列を使用して、6 つの方程式からなる連立方程式として運動方程式を書き換えることができます。質量行列では、方程式の左辺にある 1 階微分の線形結合が、行列とベクトルの積により表現されます。この形式では、連立方程式は次のようになります。
この式から、質量行列の非ゼロ要素を計算する関数を記述できます。関数は 3 つの入力を取ります。 と解ベクトル は必須 (関数本体で使用されない場合でも、これらの入力を指定しなければなりません) であり、 はオプションの追加入力で、パラメーター値を渡すために使用されます。
function M = mass(t,q,P) % Extract parameters m1 = P(1); m2 = P(2); L = P(3); g = P(4); % Mass matrix elements M = zeros(6,6); M(1,1) = 1; M(2,2) = m1 + m2; M(2,6) = -m2*L*sin(q(5)); M(3,3) = 1; M(4,4) = m1 + m2; M(4,6) = m2*L*cos(q(5)); M(5,5) = 1; M(6,2) = -L*sin(q(5)); M(6,4) = L*cos(q(5)); M(6,6) = L^2; end
次に、連立方程式 における各連立方程式の右辺の関数を記述できます。質量行列関数と同様、この関数は と という 2 つの必須入力と、パラメーター値 という 1 つのオプション入力を取ります。
function dydt = f(t,q,P) % Extract parameters m1 = P(1); m2 = P(2); L = P(3); g = P(4); % Equations to solve dydt = [q(2) m2*L*q(6)^2*cos(q(5)) q(4) m2*L*q(6)^2*sin(q(5))-(m1+m2)*g q(6) -g*L*cos(q(5))]; end
連立方程式を解く
まず、、、、および のパラメーター値からなるベクトル P を作成します。ソルバーはベクトル P を追加入力として質量行列と ODE 関数に渡します。
P = [0.1 0.1 1 9.81];
問題の初期条件のベクトルを作成します。バトンはある角度で上向きに投げられるため、初期速度には非ゼロ値を 、、 のように使用します。バトンは直立位置からの開始となるため、初期位置は 、、 となります。
y0 = [0; 4; P(3); 20; -pi/2; 2];
次に、問題を表す ode オブジェクトを作成し、ODEFcn、MassMatrix、InitialValue、および Parameters の値を指定します。オブジェクトの表示から、この問題のソルバーとして ode15s が選択されていることがわかります。質量行列があるためです。
F = ode(ODEFcn=@f,... MassMatrix=@mass,... InitialValue=y0,... Parameters=P)
F =
ode with properties:
Problem definition
ODEFcn: @f
Parameters: [0.1000 0.1000 1 9.8100]
InitialTime: 0
InitialValue: [6×1 double]
Jacobian: []
MassMatrix: [1×1 odeMassMatrix]
EquationType: standard
Solver properties
AbsoluteTolerance: 1.0000e-06
RelativeTolerance: 1.0000e-03
JacobianMethod: numerical
Solver: auto
SelectedSolver: ode15s
Show all properties
積分の時間範囲として 0 ~ 4 の 25 点からなるベクトルを作成し、solve を使用して連立方程式をシミュレートします。時間のベクトルを指定すると、ソルバーは独自の内部ステップを取りますが、指定された時点における解を内挿します。
tspan = linspace(0,4,25); sol = solve(F,tspan)
sol =
ODEResults with properties:
Time: [0 0.1667 0.3333 0.5000 0.6667 0.8333 1 1.1667 1.3333 1.5000 1.6667 1.8333 2 2.1667 2.3333 2.5000 2.6667 2.8333 3 3.1667 3.3333 3.5000 3.6667 3.8333 4]
Solution: [6×25 double]
結果のプロット
solve からの出力には、要求された各タイム ステップでの運動方程式の解が含まれます。結果を確認するために、時間経過に沿ったバトンの運動をプロットします。
解の各列をループし、タイム ステップごとにバトンの位置をプロットします。時間経過に沿った回転が確認できるよう、バトンのそれぞれの端に色を付けます。
figure title("Motion of Thrown Baton"); axis([0 22 0 25]) hold on for j = 1:length(sol.Time) theta = sol.Solution(5,j); X = sol.Solution(1,j); Y = sol.Solution(3,j); xvals = [X X+P(3)*cos(theta)]; yvals = [Y Y+P(3)*sin(theta)]; plot(xvals,yvals,xvals(1),yvals(1),"ro",xvals(2),yvals(2),"go") end hold off

参照
[1] Wells, Dare A. Schaum’s Outline of Theory and Problems of Lagrangian Dynamics: With a Treatment of Euler’s Equations of Motion, Hamilton’s Equations and Hamilton’s Principle. Schaum's Outline Series. New York: Schaum Pub. Co, 1967.