特徴を使用した 2 つの点群間の変換の推定
この例では、2 つの点群の間の剛体変換を推定する方法を示します。この例では特徴の抽出と照合を使用して、推定に必要な点の数を大幅に少なくします。点群から関数extractFPFHFeaturesを使用して高速点特徴ヒストグラム (FPFH) の特徴を抽出した後、抽出された点群から関数pcmatchfeaturesを使用して一致を検索します。最後に、関数estgeotform3dと一致する特徴を使用して剛体変換を推定します。
前処理
入力点群に剛体変換を適用して 2 つの点群を作成します。
点群データをワークスペースに読み取ります。
rng("default") ptCld = pcread("highwayScene.pcd"); ptCld.Count
ans = 65536
約 65,000 の点が含まれているため、計算速度を向上させるために点群をダウンサンプリングします。
ptCloud = pcdownsample(ptCld,gridAverage=0.2); ptCloud.Count
ans = 24596
30 度の回転と "x" 軸および y 軸の 5 単位分の並進をもつ剛体変換行列を作成します。
rotAngle = 30; trans = [5 5 0]; tform = rigidtform3d([0 0 rotAngle],trans);
入力点群を変換します。
ptCloudTformed = pctransform(ptCloud,tform);
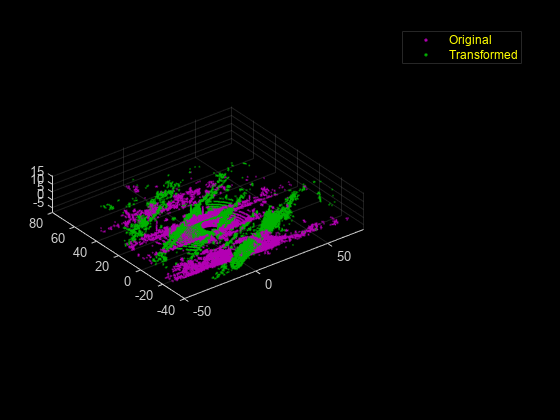
2 つの点群を可視化します。
pcshowpair(ptCloud,ptCloudTformed) axis on xlim([-50 75]) ylim([-40 80]) legend("Original","Transformed",TextColor=[1 1 0])
特徴の抽出とレジストレーション
関数 extractFPFHFeatures を使用して両方の点群から特徴を抽出します。
fixedFeature = extractFPFHFeatures(ptCloud); movingFeature = extractFPFHFeatures(ptCloudTformed);
一致する特徴を検出し、一致するペアの数を表示します。
[matchingPairs,scores] = pcmatchfeatures(fixedFeature,movingFeature, ... ptCloud,ptCloudTformed,Method="Exhaustive"); length(matchingPairs)
ans = 1814
点群から一致する点を選択します。
fixedPts = select(ptCloud,matchingPairs(:,1)); matchingPts = select(ptCloudTformed,matchingPairs(:,2));
一致する点を使用して変換行列を推定します。
estimatedTform = estgeotform3d(fixedPts.Location, ... matchingPts.Location,"rigid"); disp(estimatedTform.A)
0.8660 -0.5000 -0.0003 4.9995
0.5000 0.8660 0.0000 5.0022
0.0002 -0.0002 1.0000 0.0020
0 0 0 1.0000
定義された変換行列を表示します。
disp(tform.A)
0.8660 -0.5000 0 5.0000
0.5000 0.8660 0 5.0000
0 0 1.0000 0
0 0 0 1.0000
推定された変換を使用して ptCloudTformed を再変換し、初期点群に戻します。
ptCloudTformed = pctransform(ptCloudTformed,invert(estimatedTform));
2 つの点群を可視化します。
pcshowpair(ptCloud,ptCloudTformed) axis on xlim([-50 50]) ylim([-40 60]) title("Aligned Point Clouds")

参考
extractFPFHFeatures | estgeotform3d | pcdownsample | pcmatchfeatures