normxcorr2
正規化された 2 次元相互相関
説明
例
2 つのイメージをワークスペースに読み取って、normxcorr2 で使用するグレースケールに変換します。イメージを並べて表示します。
onion = im2gray(imread("onion.png")); peppers = im2gray(imread("peppers.png")); montage({onion,peppers})

相互相関を実行し、結果を表面として表示します。
c = normxcorr2(onion,peppers);
surf(c)
shading flat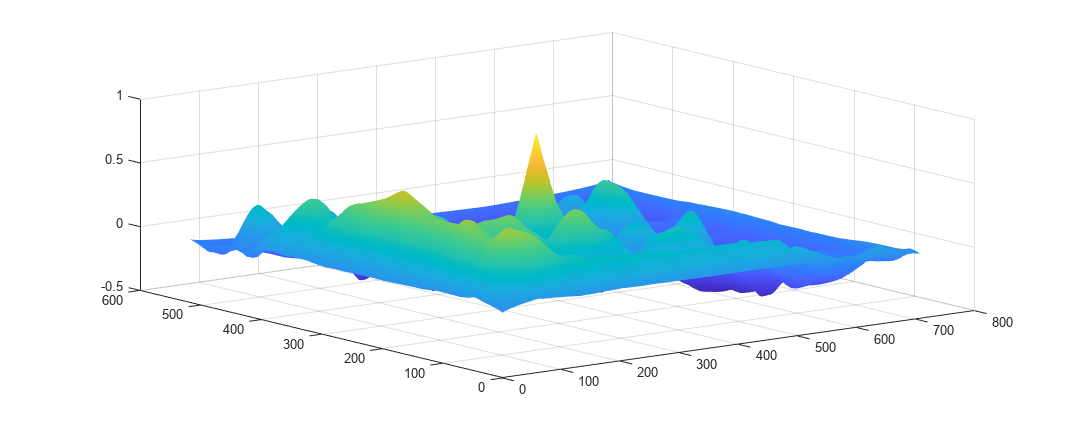
相互相関のピークを検出します。
[ypeak,xpeak] = find(c==max(c(:)));
normxcorr2 で追加されるパディングを考慮します。
yoffSet = ypeak-size(onion,1); xoffSet = xpeak-size(onion,2);
関数 drawrectangle を使用して、一致した領域を表示します。名前と値の引数 Position は、四角形の左上の座標、幅、高さを 4 要素ベクトル [xmin,ymin,width,height] として指定します。四角形の面を完全に透明と指定します。
imshow(peppers)
drawrectangle(gca,Position=[xoffSet,yoffSet,size(onion,2),size(onion,1)], ...
FaceAlpha=0);
入力引数
出力引数
アルゴリズム
normxcorr2 では、次の一般的な処理を使用します ([1]、[2])。
イメージのサイズに応じて、空間領域または周波数領域の相互相関を計算します。
あらかじめ累積和を計算することによって、局所的な和を計算します。
局所的な和を使用して相互相関を正規化し、相関係数を取得します。
実装は、[1]の式に従って行います。
ここで、
はイメージです。
はテンプレートの平均値です。
はテンプレートの下の領域にある の平均値です。
参照
[1] Lewis, J. P. "Fast Normalized Cross-Correlation." Industrial Light & Magic, 1995. https://scribblethink.org/Work/nvisionInterface/nip.pdf.
[2] Haralick, Robert M., and Linda G. Shapiro, Computer and Robot Vision, Volume II, Addison-Wesley, 1992, pp. 316-317.