setoptions
idplot および spectrumplot のオプションの設定
説明
例
同定されたモデルを取得します。
load iddata9 z9 sys = ar(z9,4);
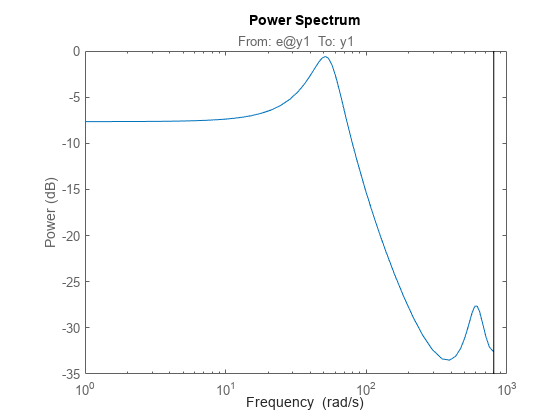
モデルのスペクトル プロットのプロット ハンドルを取得します。
h = spectrumplot(sys);
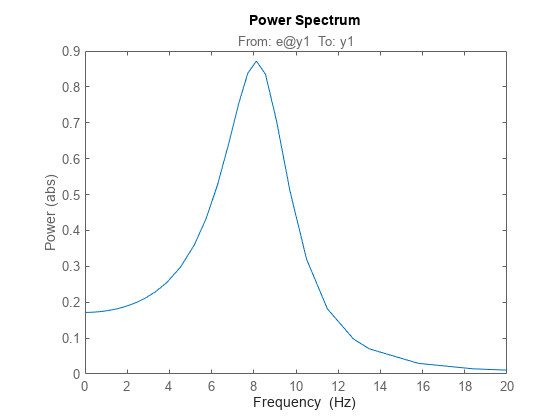
(オプション) プロット ハンドルを使用してプロット オプションを指定します。
setoptions(h,'FreqUnits','Hz','FreqScale','linear','Xlim',{[0 20]},'MagUnits','abs');
入力引数
バージョン履歴
R2012a で導入