interp1
構文
説明
例
サンプル点 x と対応するサンプル値 v を定義します。
x = [1 2 5 6]; eul = [-185:45:-50; -20*ones(1,4); zeros(1,4)]'; v = quaternion(eul,"eulerd","ZYX","frame");
x の範囲でクエリ点を定義します。
xq = [1.5 3 4 5.4];
クエリ点で内挿します。
vq = interp1(x,v,xq);
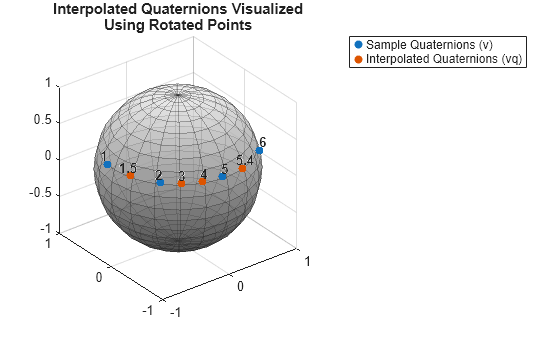
結果を可視化するには、サンプルと内挿後の四元数を使用して同じ点を回転させます。
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
単位球面をプロットし、その球面上にサンプルと内挿後の四元数をプロットします。
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,x,xq,10,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
一連の関数値を定義します。
eul = [-170:20:-70; -20*sind(0:72:360)-25; zeros(1,6)]'; v = quaternion(eul,"eulerd","ZYX","frame");
既定の点 1:6 の範囲で一連のクエリ点を定義します。この場合、v が 6 要素の quaternion 配列であるため、既定の点は 1:6 です。
xq = [1.5 2.6 3.5 4.5 5.5];
SQUAD 自然内挿法を使用して、xq における v を評価します。ここで既定の "slerp-short" 内挿法も使用できますが、この四元数関数で記述している正弦波回転については、SQUAD の方が内挿後のパスが滑らかになることに注意してください。
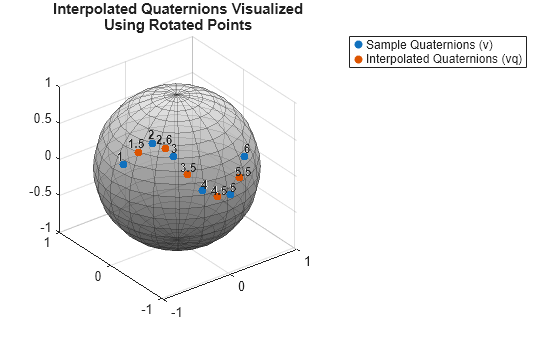
vq = interp1(v,xq,"squad-natural");結果を可視化するには、サンプルと内挿後の四元数を使用して "x" 軸の点を回転させます。
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
単位球面をプロットし、その球面上にサンプルと内挿後の四元数をプロットします。
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,1:6,xq,9,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
異なる向きを表す 3 つの四元数を定義します。
q0 = quaternion([0 0 0],"euler","ZYX","frame"); q1 = quaternion([pi/4 pi/6 pi/3],"euler","ZYX","frame"); q2 = quaternion([pi/2 pi/4 pi/2],"euler","ZYX","frame");
元のキーフレームの時間ベクトルを作成します。
x = [1 2 3];
内挿の時間ベクトルを作成します。
T = linspace(0,3,300);
interp1 で "slerp-natural" と "squad-natural" の手法を使用して内挿を行います。
quats_slerp = interp1(x,[q0 q1 q2],T,"slerp-natural")'; quats_squad = interp1(x,[q0 q1 q2],T,"squad-natural")';
両方の内挿法の角速度を計算します。
ang_vel_slerp = angvel(quats_slerp,T(2)-T(1),"frame"); ang_vel_squad = angvel(quats_squad,T(2)-T(1),"frame");
角速度をプロットします。
tl = tiledlayout(2,1);
title(tl,"Angular Velocity - SLERP vs SQUAD")SLERP と SQUAD の内挿の角速度をプロットします。SQUAD の内挿による角速度の方が SLERP を使用した内挿よりも滑らかになっていることに注目してください。
nexttile plot(T,ang_vel_slerp) ylim padded title("SLERP Natural") legend("X","Y","Z") nexttile plot(T,ang_vel_squad) ylim padded title("SQUAD Natural") xlabel(tl,"Time") ylabel(tl,"Angular Velocity (rad/s)")

サンプル点 x と対応するサンプル値 v を定義します。
x = [0 1 2]; eul = [0 30 60; 0 20 60; zeros(1,3)]'; v = quaternion(eul,"eulerd","ZYX","frame");
x の領域を越えるクエリ点 xq を指定します。
xq = [-0.5 0.5 1.5 2.5];
次に、"slerp-short" 内挿法を使用して xq における v を評価します。ここで、x の領域の外側にある値については、すべての部分が 0 に設定された四元数に割り当てます。
vq = interp1(x,v,xq,"slerp-short",ones("quaternion"))'
vq = 4×1 quaternion array
1 + 0i + 0j + 0k
0.98774 + 0.022751i - 0.084907j - 0.12903k
0.87097 + 0.151i - 0.30755j - 0.35217k
1 + 0i + 0j + 0k
入力引数
出力引数
アルゴリズム
参照
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.
[2] Dam, Erik B., Martin Koch, and Martin Lillholm. Quaternions, Interpolation and Animation. Technical Report DIKU-TR-98/5. Department of Computer Science, University of Copenhagen, July 17, 1998. https://web.mit.edu/2.998/www/QuaternionReport1.pdf.
拡張機能
バージョン履歴
R2025a で導入