lookupPose
Obtain pose of geodetic trajectory for a certain time
Syntax
Description
[
returns the pose information of the waypoint trajectory at the specified sample times. If
any sample time is beyond the duration of the trajectory, the corresponding pose information
is returned as position,orientation,velocity,acceleration,angularVelocity,ecef2ref] = lookupPose(traj,sampleTimes)NaN.
[___] = lookupPose(
additionally enables you to specify the format of the traj,sampleTimes,coordinateSystem)position
output.
Examples
Create a geoTrajectory with starting LLA at [15 15 0] and ending LLA at [75 75 100]. Set the flight time to ten hours. Sample the trajectory every 1000 seconds.
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);Output the LLA waypoints of the trajectory.
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
31.6667 31.6667 27.7778
33.3333 33.3333 30.5556
35.0000 35.0000 33.3333
36.6667 36.6667 36.1111
38.3333 38.3333 38.8889
⋮
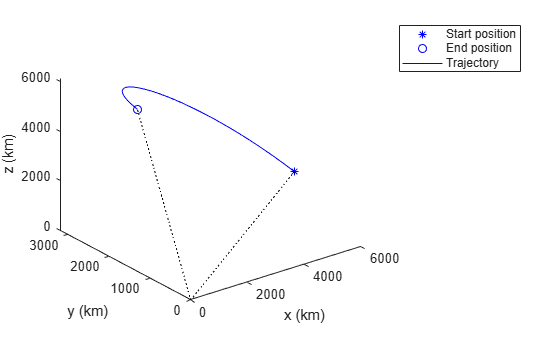
Look up the Cartesian waypoints of the trajectory in the ECEF frame by using the lookupPose function.
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');Visualize the results in the ECEF frame.
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2018b