RSim システム ターゲット ファイルを使用したホスト コンピューターでのハイブリッド動的システムの高速化、調整およびテスト
モデルを作成したら、ラピッド シミュレーション (RSim) ターゲットを使用して、モデルの動作を特徴付けることができます。ビルド プロセスで生成された実行可能プログラムは、開発用コンピューターでの非リアルタイム実行に使用されます。実行可能プログラムは、可変ステップ ソルバーやゼロクロッシング検出を使用するモデルなど、ハイブリッドな動的システムのモデルをシミュレーションするために高度に最適化されています。RSim システム ターゲット ファイルの生成コードの速度は、バッチまたはモンテ カルロ シミュレーションのプログラムを作成するのに最適な速度になります。
メモ
ラピッド シミュレーション (RSim) システム ターゲット ファイル (rsim.tlc) は将来のリリースで削除されます。
シミュレーションを高速化するには、Simulink® ラピッド アクセラレータ シミュレーション モードを使用します。ラピッド アクセラレータ シミュレーション モードは RSim システム ターゲット ファイルと同じ機能を提供しますが、より簡単に使用できます。効果的に高速化するためのモデル設計を参照してください。
MATLAB® と Simulink 環境の外部でスタンドアロンのシミュレーションを展開するには、Simulink Compiler™ を使用します。Simulink Compiler は、スタンドアロンの実行可能ファイルとしてシミュレーションをビルドおよび共有するためのターンキー ソリューションを提供します。この実行可能ファイルは、モデルのシミュレーションを設定、実行、および解析する MATLAB コードを使用したコンパイル済み Simulink モデルをパッケージ化します。Comparing Simulink Coder and Simulink Compiler (Simulink Compiler)を参照してください。
ラピッド シミュレーションについて
RSim システム ターゲット ファイルを使用して、高速なスタンドアロンのシミュレーションを実行する実行可能プログラムを生成します。シミュレーションをさまざまなデータセットで、対話的またはスクリプトでプログラム的に、モデルのリビルドなしで繰り返すことができます。これにより、モデル動作とコード生成テストの特徴付けと調整を加速化できます。
コマンド ライン オプションを使用すると、以下のことができます。
モデルのリビルドなしで、シミュレーション開始時に読み込み、および再読み込みできる 1 つ以上の MAT ファイルのパラメーター値と入力信号を定義します。
ログ データを 1 つ以上の MAT ファイルにリダイレクトし、それを解析して比較します。
シミュレーション時間を制御します。
エクスターナル モード オプションを指定します。
メモ
RSim 実行可能プログラムを実行するには、MATLAB を実行するようコンピューターを設定し、MATLAB と Simulink の各インストール フォルダーにアクセスできるようにします。開発用コンピューター上で実行されるスタンドアロン (つまり、MATLAB も Simulink もインストールされていない状態) の実行可能プログラムを展開するには、開発用コンピューター上で実行される共有ライブラリを生成するためのシステム ターゲット ファイル ert_shrlib の使用を検討してください。
ラピッド シミュレーションの利点
ラピッド シミュレーションによって得られる利点はそれぞれ異なります。シミュレーションが大きくなると、標準の Simulink シミュレーションの最大 10 倍の速度向上が見られます。モデルによっては、シミュレーション速度に目立った改良が見られないこともあります。モデルの速度の差を判断するには、標準の Simulink シミュレーションの時間を測り、結果をラピッド シミュレーションと比較します。さらに、ラピッド アクセラレータ シミュレーション モードでモデル シミュレーションをテストします。
一般的なラピッド シミュレーションのワークフロー
モデルベース デザインの他の段階と同様、モデル動作の特性化と調整は、次のワークフロー図に示すように反復プロセスです。ワークフロー内のタスクは以下のとおりです。
ラピッド シミュレーションに入力ソース データを提供するInport ブロックを設定します。
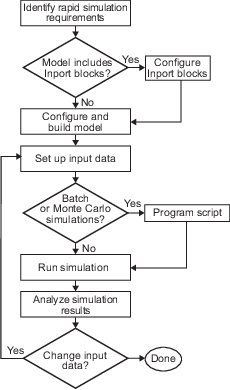
ラピッド シミュレーション要件の特定
ラピッド シミュレーションを設定するには、まずシミュレーション要件を特定します。
シミュレーション ソース データを提供するための入力端子の構成
Inport ブロックをラピッド シミュレーションの入力データ ソースに使用できます。使用するには、外部の MAT ファイルからデータをインポートできるようにブロックを設定します。既定の設定では、Inport ブロックは下流ブロックからのパラメーター設定を継承します。ほとんどの場合、外部の MAT ファイルからデータをインポートするには、次のブロック パラメーターが MAT ファイルのソース データに一致するように明示的に設定を行わなければなりません。
[メイン] 、 [データを内挿する]
[信号属性] 、 [端子の次元]
[信号属性] 、 [データ型]
[信号属性] 、 [信号タイプ]
モデルの内容を管理できない場合は、MAT ファイルのデータを変更して、モデルが入力を期待する内容に適合させなければならないことがあります。入力データの特性とデータを受け取る Inport ブロックの仕様は一致しなければなりません。
これらのパラメーターの調整方法、および Inport ブロックで使用する MAT ファイルの作成方法は、Create a MAT-File for an Inport Blockを参照してください。前述のブロック パラメーターの説明は、Inport を参照してください。
参考
トピック
- 高速化
- 効果的に高速化するためのモデル設計
- Comparing Simulink Coder and Simulink Compiler (Simulink Compiler)