Embedded Coder を使用したコード生成
この例では、Simulink® モデルのシステム ターゲット ファイルを選択し、モデル パラメーターを構成して、組み込みシステム用の C コードを生成し、生成されたファイルを表示する方法を説明します。
このモデルは、定数ブロックである INC、LIMIT、RESET によってパラメーター化された Triggered Subsystem に送信される 8 ビット カウンターを表しています。Input および Output はこのモデルの I/O を表しています。Amplifier サブシステムはゲイン ファクター K によって入力信号を増幅し、信号 equal_to_count が true のときに更新されます。
1. モデルを開きます。
model='EmbeddedCoderIntro';
open_system(model)

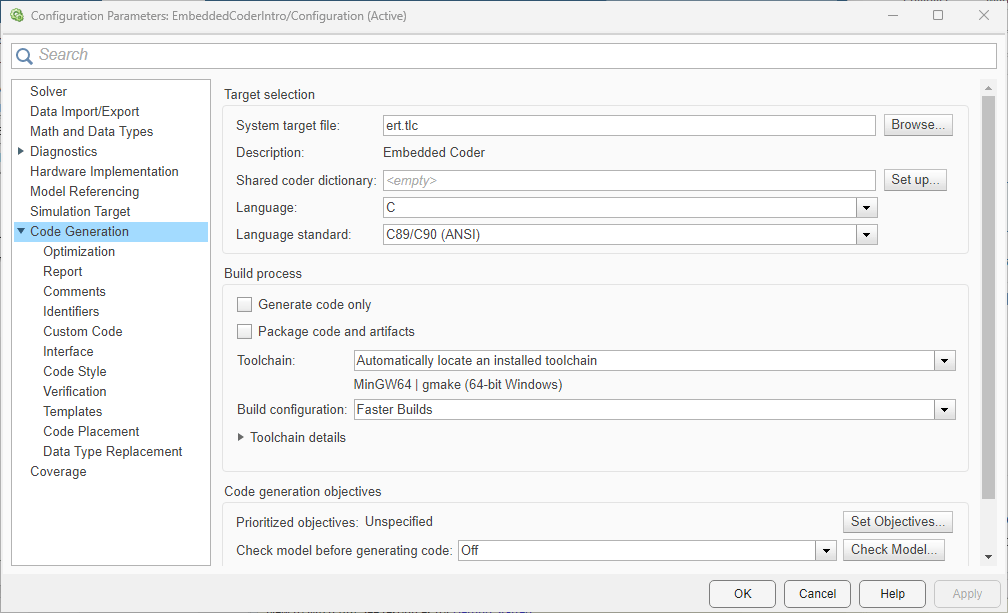
2. [モデル コンフィギュレーション パラメーター] ダイアログ ボックスを開きます。
cs = getActiveConfigSet(model); openDialog(cs);
3. [コード生成] タブを選択します。
4. システム ターゲット ファイルを選択するには、[ターゲットの選択] ペインで [参照] をクリックします。特定のターゲット環境または目的に合わせてコードを生成できます。いくつかの組み込みのターゲット設定オプションがシステム ターゲット ファイルによって提供されており、ターゲット環境のコード生成プロセスを制御します。


5. 組み込みリアルタイム (ERT) システム ターゲット ファイルを選択し、[適用] をクリックします。
ERT システム ターゲット ファイルでは、アプリケーションの目的に基づいてコード生成設定を指定および優先順位付けするために使用できるユーティリティがサポートされます。
6. [コード生成アドバイザー] ペインの [目的の設定] をクリックします。
生成されるコードの目的を設定して優先順位を付けることができます。たとえば、アプリケーションにとってコードのトレーサビリティが非常に重要な条件となる場合でも、コードの実行効率性を犠牲にしてまで優先しないことが考えられます。

7. [目的の設定] ペインで [実行効率性] および [トレーサビリティ] を選択します。[OK] をクリックします。
コードを生成する前に、目的の組み合わせを選択して優先順位を付けることができます。

8. モデル ウィンドウで、次のいずれかのオプションを使用して、モデルのコード生成およびビルド プロセスを開始します。
[モデルのビルド] ボタンをクリックする。
Ctrl+B キーを押す。
MATLAB® コマンド ラインから
slbuildコマンドを呼び出す。
9. コード生成レポートを表示します。
このレポートには、EmbeddedCoderIntro.c、関連するユーティリティとヘッダー ファイル、トレーサビリティと検証レポートが含まれます。

この図は、EmbeddedCoderIntro.c の一部を示しています。

10. モデルを閉じます。
bdclose(model)