Client-Server Communication Interfaces
Applications and components in a platform environment can communicate by using client-server communication. To model client-server communication, use the Simulink Function and Function Caller blocks. A Simulink Function block represents a shared resource. You define the logic as a resource in a Simulink Function block, which separates the function interface (name and arguments) from the logic implementation. Function callers (Function Caller blocks, MATLAB Function blocks, and Stateflow charts) can use the function logic at different levels of the model hierarchy.
The Simulink Function block shares states between function callers. The code generator produces one function. If the Simulink Function block contains blocks that have states, such as a delay or memory, the states persist between function callers.
Client-Server C Code Communication shows how to use the Simulink Function and Function Caller blocks to generate client-service communication C code. Client-Server C++ Code Communication shows how to use the blocks to generate client-server communication C++ code. For more information about using the Simulink Function and Function Caller blocks, see Simulink Function Blocks and Code Generation.
Client-Server C Code Communication
This example shows how to use the Simulink Function and Function Caller blocks to generate client-server communication code. The code generator produces a local server function and a global server function that complies with code requirements so that existing external code can call the function. The code generator also produces calls to the server functions. The call to the global server function shows that the global function is reused (shared).
Code requirements for the global function are:
Function names start with prefix
func_.Names of input arguments are of the form
xn, wherenis a unique integer value.Names of output arguments are of the form
yn, wherenis a unique integer value.Input and output arguments are integers (
int) and are passed by reference. The native integer size of the target hardware is 32 bits.
You create a function that calls the generated server function code. Then, you construct and configure a model to match the code requirements.
Inspect External Code That Calls Server Functions
Open and inspect the example files call_times2.h and call_times2.c. After you inspect the files, close them.
call_times2.h
edit("call_times2.h");typedef int my_int;
call_times2.c
edit("call_times2.c");#include "call_times2.h"
void call_times2(void)
{
int times2result;
func_times2(x1, &y1);
printf('Times 2 Value:', y1);
}
This C code calls global server function func_times2. The function multiplies an integer input value x1 by 2 and returns the result as y1.
Create Model
Open the example model ClientServerSimulinkFunctions. The model includes two Simulink functions modeled as Simulink Function blocks, func_times2 and func_times3, and a call to each function. As indicated in the model, the visibility of the Simulink Function block for func_times2 is set to global. That visibility setting makes the function code accessible to other code, including external code that you want to integrate with the generated code. The visibility for func_times3 is set to scoped.
open_system("ClientServerSimulinkFunctions.slx");
If you set model configuration parameter File packaging format to Modular, the code generator produces function code for the model.
For more information, see Generate Code for Simulink Function and Function Caller.
Configure Generated Code to Reuse Custom Data Type
The example assumes that the generated code runs on target hardware using a native integer size of 32 bits. The external code represents integers by using data type my_int, which is an alias of int. Configure the code generator to use my_int in place of the data type that the code generator uses by default, which is int32_T.
1. Create a Simulink.AliasType object to represent the custom data type my_int.
my_int = Simulink.AliasType;
2. Set the alias type properties. Enter a description, set the scope to Imported, specify the header file that includes the type definition, and associate the alias type with the Simulink base type int32.
my_int.Description='Custom 32-bit int representation'; my_int.DataScope='Imported'; my_int.HeaderFile='call_times2.h'; my_int.BaseType='int32'; my_int
my_int =
AliasType with properties:
Description: 'Custom 32-bit int representation'
DataScope: 'Imported'
HeaderFile: 'call_times2.h'
BaseType: 'int32'
3. Configure the code generator to replace instances of type int32_T with my_int. In the Configuration Parameters dialog box, open the Code Generation > Data Type Replacement pane.
Select Specify custom data type names.
In the Data type names table, enter
my_intfor the replacement name forint32.
Configure Server Functions
For external code to call a global server function, configure the corresponding Simulink Function block to have global visibility and an interface that matches what is expected by the external callers.
1.Open the block that represents the times2 function.

2. Configure the function name and visibility by setting Trigger Port block parameters. For example, the code requirements specify that the function name start with the prefix func_.
Set Function name to
func_times2.Set Function visibility to
global.
3. Configure the function input and output arguments by setting Argument Inport and Argument Outport block parameters. For example, the code requirements specify that argument names be of the form xn and yn. The requirements also specify that arguments be type my_int.
On the Main tab, set Argument name to
x1(input) andy1(output).On the Signal Attributes tab, set Data type to
int32. With the data type replacement that you specified previously,int32appears in the generated code asmy_int.
4. Configure the Simulink Function block code interface. At the top level of the model, right-click the block representing global function func_times2. To add the Embedded Coder app options to the menu, point to Select Apps and click the Embedded Coder button ![]() . Then, in the Embedded Coder app section, select Configure C/C++ Function Interface.
. Then, in the Embedded Coder app section, select Configure C/C++ Function Interface.
Set C/C++ function name to
func_times2.Set C/C++ return argument to
void.Set C/C++ Identifier Name for argument
x1tox1.Set C/C++ Identifier Name for argument
y1toy1.
If the dialog box lists output argument y1 before input argument x1, reorder the arguments by dragging the row for x1 above the row for y1.
Configure Local Server Function
Configure a Simulink Function block that represents a local server function to use scoped visibility. Based on code requirements, you might also have to configure the function name, input and output argument names and types, and the function interface.
1.Open the block that represents the times3 function.
2. Configure the function name and visibility by setting Trigger Port block parameters. For example, the code requirements specify that the function name start with the prefix func_.
Set Function name to
func_times3.Set Function visibility to
scoped.
3. Configure the function input and output arguments by setting Argument Inport and Argument Outport block parameters. For example, the code requirements specify that argument names be of the form xn and yn. The requirements also specify that arguments be type my_int.
On the Main tab, set Argument name to
x1(input) andy1(output).On the Signal Attributes tab, set Data type to
int32. With the data type replacement that you specified previously,int32appears in the generated code asmy_int.
4. Configure the Simulink Function block code interface. At the top level of the model, right-click the scoped function func_times3. From the menu, select C/C++ Code > Configure C/C++ Function Interface. In this case, the code generator controls naming the function and arguments. The function name combines the name of the root model and the function name that you specify for the trigger port of the Simulink Function block. In this example, the name is ClientServerSimulinkFunctions_func_times3.
You can set C/C++ return argument to the argument name that you specify for the Argument Outport block or void. For this example, set it to void.
For arguments, the code generator prepends rtu_ (input) or rty_ (output) to the argument name that you specify for the Argument Inport block.
If the dialog box lists output argument y1 before input argument x1, reorder the arguments by dragging the row for x1 above the row for y1.
Configure Function Callers
For each function caller (FunctionCaller1 and FunctionCaller2), configure Function Caller block parameters:
Set Function prototype to
y1 = func_times2(x1) and y1 = func_times3(x1)respectively.Set Input argument specifications to
int32(1).Set Output argument specifications to
int32(1).
Generate and Inspect Code
Generate code for the model.
Global Server Function Code
Source code for global server function func_times2 is in the build folder in subsystem file, func_times2.c.
#include "func_times2.h"
#include "func_times2_private.h"
/* Include model header file for global data */
#include "ClientServerSimulinkFunctions_private.h"
void func_times2(my_int x1, my_int *y1)
{
*y1 = x1 << 1;
}
Local Server Function Code
The code generator places the definition for the local (scoped) function func_times3 in file build folder in file ClientServerSimulinkFunctions.c.
void ClientServerSimulinkFunctions_times3(my_int rtu_x1, my_int *rty_y1)
{
*rty_y1 = 3 * rtu_x1;
}
Calls to Generated Functions
The model execution (step) function, in model file ClientServerSimulinkFunctions.c, calls the two Simulink functions: global function func_times2 and local function ClientServerSimulinkFunctions_func_times3. The name ClientServerSimulinkFunctions_times3 reflects the scope of the local function by combining the name of the model and the name of the function.
void ClientServerSimulinkFunctions_step(void)
{
my_int rtb_FunctionCaller2;
func_times2(ClientServerSimulinkFunctions_U.In1, &rtb_FunctionCaller2);
ClientServerSimulinkFunctions_Y.Out1 = rtb_FunctionCaller2;
ClientServerSimulinkFunctions_func_times3(ClientServerSimulinkFunctions_U.In2, &rtb_FunctionCaller2);
ClientServerSimulinkFunctions_Y.Out2 = rtb_functionCaller2;
.
.
.
Entry-Point Declaration for Local Server Function
The model header file ClientServerSimulinkFunctions.h includes an extern declaration for function ClientServerSimulinkFunctions_times3. That statement declares the function entry point.
extern void ClientServerSimulinkFunctions_times3(my_int rtu_x1, my_int *rty_y1);
Include Statements for Global Server Function
The model header file ClientServerSimulinkFunctions.h lists include statements for the global function func_times2.
#include "func_times2.h"
Local Macros and Data for Global Server Function
The subsystem header file func_times2_private.h defines macros and includes header files that declare data and functions for the global server function, func_times2.
#ifndef RTW_HEADER_func_times2_private_h_ #define RTW_HEADER_func_times2_private_h_ #ifndef ClientServerSimulinkFunctions_COMMON_INCLUDES_ #define ClientServerSimulinkFunctions_COMMON_INCLUDES_ #include "rtwtypes.h" #endif #endif
Entry-Point Declaration for Global Server Function
The shared header file func_times2.h, in the shared utilities folder slprj/ert/_sharedutils, lists shared type includes for rtwtypes.h. The file also includes an extern declaration for the global server function, func_times2. That statement declares the function entry point.
#ifndef func_times2_h_ #define func_times2_h_ #include "rtwtypes.h" extern void func_times2(my_int rtu_x1, my_int *rty_y1); #endif
Client-Server C++ Code Communication
You can generate C++ code to support client-server communication by generating abstract classes for modeled client and server components. This type of code generation is supported for models that use scoped function ports as described in Model Client and Server Components Using Function Ports. After code generation, you must then handwrite code to implement the generated classes. The basic workflow is the following:
Create your own main file. In the program, create concrete methods from the generated abstract pure virtual methods shown in the example as
addandsub.Implement the class functions
addandsubto call into your selected middleware to publish and subscribe data.Create an instance of your implemented client and server scoped function port classes.
Create an instance of the model class by using the instances of each scoped function port class as arguments in the model constructor.
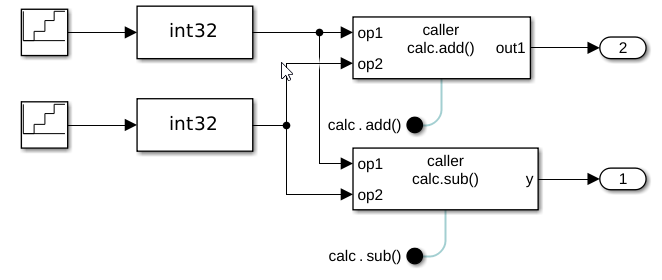
For example, the following modeled client requests the services of
add and sub:
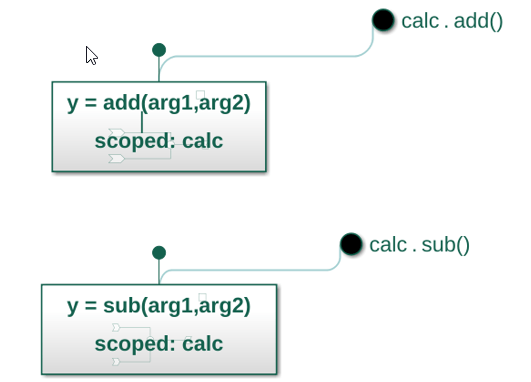
The corresponding modeled server provides these services:
The resulting generated code, as shown in the header files, is the following:
Generated Client-Server Code
| Client Code | Server Code |
|---|---|
// Class declaration for model calc_client
class calc_client final
{
// public data and function members
public:
// External inputs (root inport signals with default storage)
struct ExtU_calc_client_T {
real_T Input; // '<Root>/Input'
real_T Input1; // '<Root>/Input1'
real_T Input2; // '<Root>/Input2'
real_T Input3; // '<Root>/Input3'
};
// External outputs (root outports fed by signals with default storage)
struct ExtY_calc_client_T {
real_T Outport; // '<Root>/Outport'
real_T Outport1; // '<Root>/Outport1'
};
...
// Constructor
calc_client(calcT &calc_arg);
// Root inports set method
void setExternalInputs(const ExtU_calc_client_T *pExtU_calc_client_T)
{
calc_client_U = *pExtU_calc_client_T;
}
// Root outports get method
const ExtY_calc_client_T &getExternalOutputs() const
{
return calc_client_Y;
}
// model initialize function
static void initialize();
// model step function
void doAdd();
// model step function
void doSub();
// model terminate function
static void terminate();
...
// private data and function members
private:
// External inputs
ExtU_calc_client_T calc_client_U;
// External outputs
ExtY_calc_client_T calc_client_Y;
calcT &calc;
};
|
// Class declaration for model calc_server
// Forward declaration
class calc_server;
class calc_servercalcT : public calcT
{
// public data and function members
public:
calc_servercalcT(calc_server &aProvider);
virtual void add(real_T u2, real_T u1, real_T *y);
virtual void sub(real_T u2, real_T u1, real_T *y);
// private data and function members
private:
calc_server &calc_server_mProvider;
};
class calc_server final
{
public:
...
// Service port get method
calcT & get_calc();
private:
calc_servercalcT calc;
...
}; |
To implement these abstract classes, you must handwrite the code. The following is a POSIX implementation example:
Implemented Client-Server Code
| Client Code | Server Code |
|---|---|
class mCalcModelClasscalcT : public calcT{
public:
mCalcModelClasscalcT() {
clnt = clnt_create (host, COMPUTE, COMPUTE_VERS, "udp");
if (clnt == NULL) {
clnt_pcreateerror (host);
exit (1);
}
}
void add( int32_T arg0, int32_T arg1, int32_T* arg2)
{
int32_T *result_1;
operands add_6_arg;
// Do data marshaling into struct
add_6_arg.num1 = arg0;
add_6_arg.num2 = arg1;
result_1 = add_6(&add_6_arg, clnt);
if (result_1 == (int *) NULL) {
clnt_perror (clnt, "call failed");
}
// Marshal the result
*arg2 = *result_1;
}
void sub( int32_T arg0, int32_T arg1, int32_T* arg2)
{
int32_T *result_2;
operands sub_6_arg;
sub_6_arg.num1 = arg0;
sub_6_arg.num2 = arg1;
result_2 = sub_6(&sub_6_arg, clnt);
if (result_2 == (int *) NULL) {
clnt_perror (clnt, "call failed");
}
*arg2 = *result_2;
}
private:
CLIENT *clnt;
};
static mCalcModelClasscalcT calc_arg;
static mCalcModelClass mCalc_Obj( calc_arg);// Instance of model class |
static mServer mCalcSvr_Obj;
int *
add_6_svc(operands *argp, struct svc_req *rqstp)
{
static int result;
mCalcSvr_Obj.get_calc().add(argp->num1, argp->num2, &result);
return &result;
}
int *
sub_6_svc(operands *argp, struct svc_req *rqstp)
{
static int result;
mCalcSvr_Obj.get_calc().sub(argp->num1, argp->num2, &result);
return &result;
} |
Client-server communication uses the same modeling pattern as messages by generating an abstract interface that can be elaborated on for each scoped function port.
See Also
Simulink Function | Function Caller