車両速度の制御
このモデルではLongitudinal Controller Stanleyブロックを使用して、前進運動の車両の速度を制御します。このモデルでは、車両は秒速 0 から 10 メートルに加速します。
Longitudinal Controller Stanley ブロックは、積分アンチワインドアップを使用した離散比例-積分コントローラーです。車両の現在の速度および走行方向を指定すると、このブロックは、指定した基準速度を満たすために必要な加速コマンドおよび減速コマンドを出力します。

モデルを実行します。次に、スコープを開いて、速度の変化および対応する加速コマンドと減速コマンドを確認します。
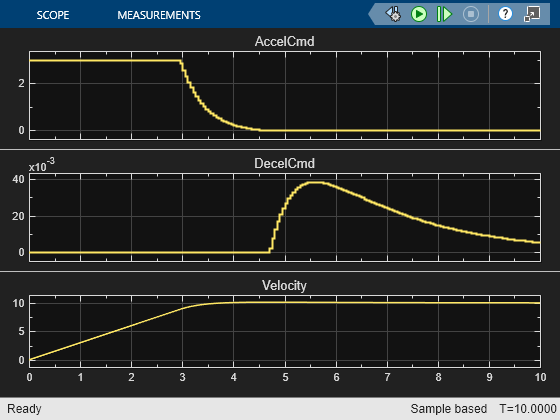
Longitudinal Controller Stanley ブロックは、最大値である秒速 3 メートルで加速コマンドを飽和させます。このブロックの [縦方向の最大加速度 (m/s^2)] パラメーターにより、この最大値が決まります。このパラメーターを調整してモデルを再度シミュレートしてください。スコープで変更の効果を観察します。調整できる他のパラメーターには、ブロックの比例および積分成分のゲイン係数があります。それぞれ [比例ゲイン、Kp] パラメーターおよび [積分ゲイン、Ki] パラメーターを使用します。
参考
Longitudinal Controller Stanley | Lateral Controller Stanley