制御システム調整器での制御アーキテクチャの指定
制御アーキテクチャについて
制御システム調整器を使用すると、どのようなアーキテクチャをもつ制御システムでも調整できます。コントローラーが制御下のシステムとどのようにやり取りするかは、"制御システムのアーキテクチャ" によって定義されます。アーキテクチャはシステムの調整可能な制御要素、追加のフィルター コンポーネントとセンサー コンポーネント、制御下のシステム、これらすべての要素間での相互接続で構成されています。たとえば、一般的な制御システムのアーキテクチャは、次の図のような単一ループ フィードバック構成です。

G はプラント モデル、H はセンサー ダイナミクスです。通常、これらは制御システムの固定コンポーネントです。プレフィルター F とフィードバック コントローラー C は調整可能な要素です。このブロック線図フォームでは制御システムが非常に便利に表現されているため、これらの要素は固定ブロックおよび調整可能なブロックと呼ばれます。
制御システム調整器では、制御システムのアーキテクチャを定義する方法がいくつかあります。
図に示した、事前定義されたフィードバック構成を使用。
固定された LTI コンポーネントおよび調整可能な制御設計ブロックから一般化状態空間 (
genss) モデルを作成することで、MATLAB® で制御システム アーキテクチャをモデル化。Simulink® で制御システムをモデル化し、制御システム調整器で調整するブロックを指定 (Simulink Control Design™ ソフトウェアが必要)。
事前定義されたフィードバック アーキテクチャ
制御システムが次の図のような単一ループ フィードバック構成である場合、制御システム調整器に組み込まれている事前定義されたフィードバック構成を使用します。
たとえば、ある DC モーターの PID コントローラーを調整すると仮定します。モーターの応答は G(s) = 1/(s + 1)2 としてモデル化されます。プラントを表す固定 LTI モデルと調整可能な PID コントローラー モデルを作成します。
Gmot = zpk([],[-1,-1],1); Cmot = tunablePID('Cmot','PID');
制御システム調整器を開きます。
controlSystemTuner
制御システム調整器が開きます。この既定のアーキテクチャを調整するために設定します。次に、アーキテクチャのブロックの値を指定します。 をクリックして [標準のフィードバック構成] ダイアログ ボックスを開きます。
をクリックして [標準のフィードバック構成] ダイアログ ボックスを開きます。

作成した C および G の値を入力します。制御システム調整器がこれらの値を MATLAB ワークスペースから読み取ります。[OK] をクリックします。
センサー ダイナミクスの既定値は、固定された 1 のゲインの伝達関数です。フィルター F の既定値は調整可能なゲイン ブロックです。
これで、調整するブロックの選択、調整目標の作成および制御システムの調整を実行できます。
任意のフィードバック制御アーキテクチャ
制御アーキテクチャが制御システム調整器の事前定義された制御アーキテクチャと一致しない場合、コントローラー要素を表す調整可能なコンポーネントを使用して一般化状態空間 (genss) モデルを作成することができます。たとえば、調整可能な 2 つの PID コントローラーを含む、次の図のようなカスケード制御システムを調整すると仮定します。
.
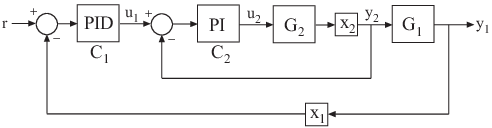
コントローラーの調整可能な制御設計ブロック、プラント コンポーネントの固定 LTI モデル (G1 および G2) を作成します。また、オプションのループ開始点の位置 x1 および x2 も含めます。これらの位置は、システムの調整要件を指定するために、ループを開始したり、信号を加えたりできる場所を示しています。
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2');
これらのコンポーネントを接続して全体の閉ループ制御システムのモデルを作成します。
InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
CL0 は調整可能な genss モデルです。入力チャネルと出力チャネルの名前を指定すると、システムの調整要件を指定する際に識別できるようになります。
制御システム調整器を開き、このモデルを調整します。
controlSystemTuner(CL0)
これで、調整するブロックの選択、調整目標の作成および制御システムの調整を実行できます。
Simulink の制御システム アーキテクチャ
Simulink Control Design ソフトウェアがある場合、Simulink モデルの任意の制御システム アーキテクチャをモデル化したり、制御システム調整器でモデルを調整することができます。
Simulink モデルを調整するために制御システム調整器を開くを参照してください。