量子化されたシステムの絶対的な安定性
この例では、線形時不変システムが円錐セクターに属する静的な非線形性とのフィードバック相互接続にある場合、絶対的な安定性を強制する方法を示します。
フィードバック接続
図 1 に示すフィードバック接続について考えます。

図 1: フィードバック接続
 は線形時不変システム、
は線形時不変システム、 は次を満たす円錐セクター
は次を満たす円錐セクター ![$[\alpha,\beta]$](../../examples/control/win64/AbsoluteStabilityForQuantizedSystemExample_eq17999177181437605090.png) (ここで
(ここで  ) に属する静的な非線形性です。
) に属する静的な非線形性です。

この例では、 は次の離散時間システムです。
A = [0.9995, 0.0100, 0.0001;
-0.0020, 0.9995, 0.0106;
0, 0, 0.9978];
B = [0, 0.002, 0.04]';
C = [2.3948, 0.3303, 2.2726];
D = 0;
G = ss(A,B,C,D,0.01);
セクター境界のある非線形性
この例では、非線形性 が対数量子化器となります。これは次のように定義されます。

ここで、 です。この量子化器はセクター境界
です。この量子化器はセクター境界 ![$[\frac{2\rho}{1+\rho},\frac{2}{1+\rho}]$](../../examples/control/win64/AbsoluteStabilityForQuantizedSystemExample_eq05936810714490360334.png) に属します。たとえば、
に属します。たとえば、 の場合、量子化器は円錐セクター [0.1818,1.8182] に属します。
の場合、量子化器は円錐セクター [0.1818,1.8182] に属します。
% Quantizer parameter rho = 0.1; % Lower bound alpha = 2*rho/(1+rho) % Upper bound beta = 2/(1+rho)
alpha =
0.1818
beta =
1.8182
量子化器のセクター境界をプロットします。
PlotSectorBound(rho)

 は量子化の密度を表します。ここで
は量子化の密度を表します。ここで  です。 が大きいほど、量子化された値はより正確になります。この量子化器の詳細については、[1] を参照してください。
です。 が大きいほど、量子化された値はより正確になります。この量子化器の詳細については、[1] を参照してください。
絶対的な安定性の円錐セクター条件
量子化器の円錐セクター行列は次によって与えられます。

図 1 のフィードバック接続の安定性を保証するには、線形システム が次を満たす必要があります。

ここで、 と
と  は、それぞれ の入力と出力です。
は、それぞれ の入力と出力です。
この条件は、セクター インデックス  が
が 1 より小さいかどうかを確認することで検証できます。
である量子化器の円錐セクター行列を定義します。
Q = [1,-(alpha+beta)/2;-(alpha+beta)/2,alpha*beta];
Q と G のセクター インデックスを取得します。
R = getSectorIndex([1;-G],-Q)
R =
1.8247
 であるため、閉ループ システムは安定していません。この不安定性を確認するには、次の Simulink® モデルを使用します。
であるため、閉ループ システムは安定していません。この不安定性を確認するには、次の Simulink® モデルを使用します。
mdl = 'DTQuantization';
open_system(mdl)

Simulink モデルを実行します。
sim(mdl)
open_system('DTQuantization/output')
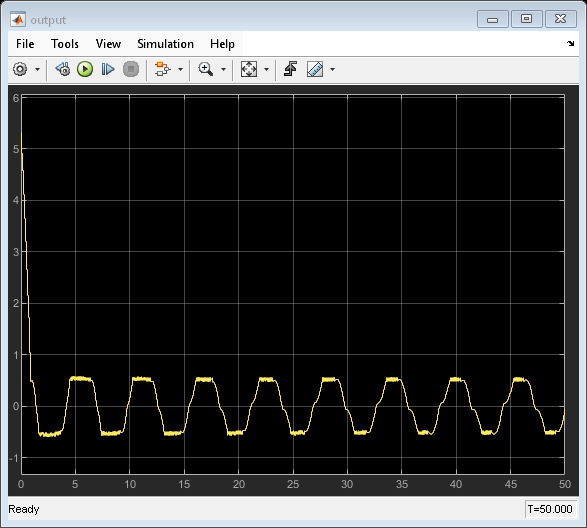
出力軌跡から、閉ループ システムが不安定であることがわかります。これは、 の量子化器では粗すぎるためです。
 として、量子化の密度を濃くします。量子化器は円錐セクター [0.4,1.6] に属します。
として、量子化の密度を濃くします。量子化器は円錐セクター [0.4,1.6] に属します。
% Quantizer parameter rho = 0.25; % Lower bound alpha = 2*rho/(1+rho) % Upper bound beta = 2/(1+rho)
alpha =
0.4000
beta =
1.6000
量子化器のセクター境界をプロットします。
PlotSectorBound(rho)

である量子化器の円錐セクター行列を定義します。
Q = [1,-(alpha+beta)/2;-(alpha+beta)/2,alpha*beta];
Q と G のセクター インデックスを取得します。
R = getSectorIndex([1;-G],-Q)
R =
0.9702
 なので、 である量子化器は、フィードバック接続の安定性の円錐セクター条件を満たします。
なので、 である量子化器は、フィードバック接続の安定性の円錐セクター条件を満たします。
として Simulink モデルを実行します。
sim(mdl)
open_system('DTQuantization/output')

セクター インデックスに示されるように、閉ループ システムは安定しています。
参考文献
[1] M. Fu and L. Xie,"The sector bound approach to quantized feedback control," IEEE Transactions on Automatic Control 50(11), 2005, 1698-1711.