このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
前景検出を使用した自動車の追跡
この例では、混合ガウス モデル (GMM) を使ってビデオ シーケンス内の自動車を検出しカウントする方法を説明します。
モデル例
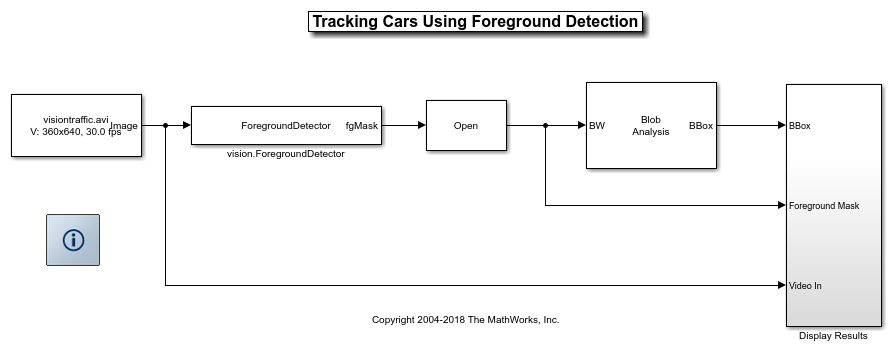
次の図は、「前景検出を使用した自動車の追跡」のモデルを示しています。
検出と追跡の結果
自動車の検出とカウントは交通パターンの解析に使用できます。検出は、タイプ別に車両の追跡や分類を行う場合など、さらに高度なタスクを実行する前の最初の手順でもあります。
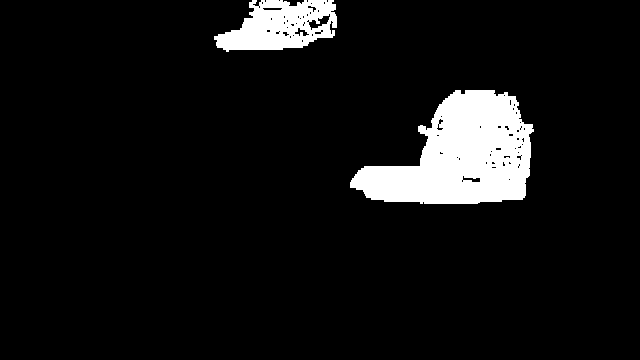
この例では vision.ForegroundDetector を使用して、静止カメラで撮影されたビデオ シーケンスの前景のピクセルを推定します。vision.ForegroundDetector は、混合ガウス モデルを使用して背景を推定し、前景にあるオブジェクト (ここでは走行中の自動車) を強調表示する前景マスクを作成します。
その後、Blob Analysis ブロックを使用して前景マスクを解析し、自動車の周りに境界ボックスを作成します。最後に、自動車の数と境界ボックスを元のビデオに描き込んで、最終結果を表示します。
追跡の結果

Xilinx Zynq ボード上でのプロトタイプ
この例のアルゴリズムは、組み込みソフトウェアの実装に適しています。これは、Xilinx™ Zynq™ 動画処理のリファレンス設計を使用して、ARM™ プロセッサに展開できます。Tracking Cars with Zynq-Based Hardware (SoC Blockset)を参照してください。