深層学習用点群データの符号化
畳み込みニューラル ネットワークを点群データと共に使用する場合、特定の主要な処理 (畳み込みなど) には、空間的に規則的にサンプリングされた入力データが必要です。空間的に規則的にサンプリングされていない点群データや LIDAR データは、前処理パイプラインのどこかで、規則的にサンプリングされた構造に変換しなければなりません。点群データを高密度でグリッド化された構造に変換するには、さまざまな方法があります [1][2][3]。この例では、ボクセル化という簡単な方法を説明します。
点群データのボクセル化
まず、Sydney Urban Objects Dataset を使用するために、データストアを定義します。
dataPath = downloadSydneyUrbanObjects(tempdir); ds = loadSydneyUrbanObjectsData(dataPath);
データストアからサンプル出力データを取得します。
data = preview(ds); disp(data)
{1×1 pointCloud} {[4wd]}
データストアのサンプル出力データを表示します。
figure
ptCloud = data{1};
pcshow(ptCloud);
label = string(data{2});
title(label);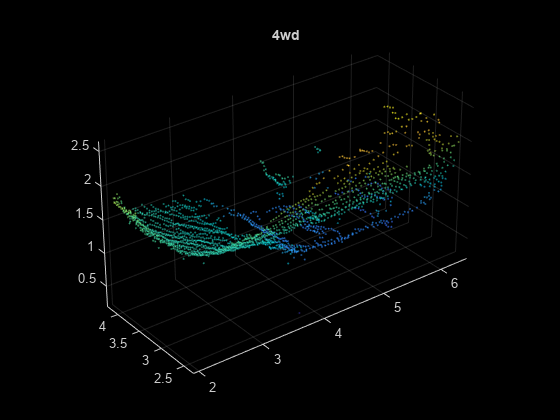
Warning: An error occurred while drawing the scene: GraphicsView error in command: interactionsmanagermessage: TypeError: Cannot read properties of null (reading '_gview')
at new g (https://127.0.0.1:31515/toolbox/matlab/uitools/figurelibjs/release/bundle.mwBundle.gbtfigure-lib.js?mre=https
関数 pcbin を使用して、pointCloud 入力オブジェクトの座標系に対する、任意の規則的な 3 次元グリッド化を定義します。また、pcbin を使用すると、出力として cell 配列が返されます。この配列には、入力 pointCloud の各点のビンの空間的な位置が含まれています。この例では、入力 pointCloud は [32,32,32] サイズの出力グリッドでビン化されます。このグリッドは、入力 pointCloud の XLimits、YLimits、および ZLimits までが範囲となります。
outputGridSize = [32,32,32];
bins = pcbin(data{1},outputGridSize);bins の各 cell には、特定の点の位置に該当する ptCloud.Location の点のインデックスが含まれています。MATLAB® 関数 cellfun を使用すると、bins を入力として使用する点群データの一般的な符号化を定義できます。
occupancyGrid = cellfun(@(c) ~isempty(c),bins);
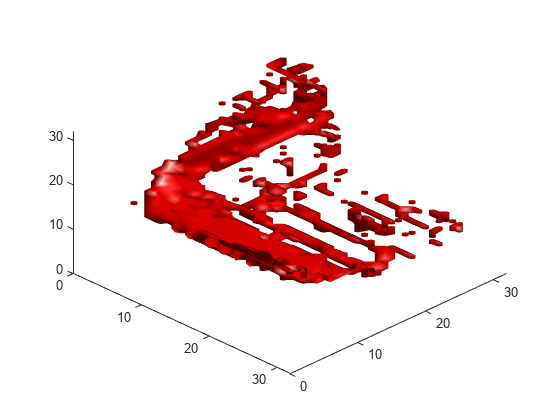
3 次元占有グリッドを定義します。このグリッドでは、少なくとも 1 つの点によって占められたグリッド位置は true となり、そうでない場合は false となります。
figure; p = patch(isosurface(occupancyGrid,0.5)); view(45,45); p.FaceColor = "red"; p.EdgeColor = "none"; camlight; lighting phong
データストアを変換して点群の符号化をデータセット全体に適用する
データストアの関数 transform を使用して、入力データストアの各観測値に単純な占有グリッドの符号化を適用します。サポート関数の節に含まれている関数 formOccupancyGrid は、上記の pcbin とまったく同じ方法を使用します。
dsTransformed = transform(ds,@formOccupancyGrid); exampleOutputData = preview(dsTransformed); disp(exampleOutputData);
{32×32×32 logical} {[4wd]}
得られたデータストア dsTransformed は、trainnet や DataLoader などの深層学習インターフェイスに渡して、深層ニューラル ネットワークの学習に使用できます。
参考文献
[1] Maturana, D. and Scherer, S., VoxNet: A 3D Convolutional Neural Network for Real-Time Object Recognition, IROS 2015.
[2] AH Lang, S Vora, H Caesar, L Zhou, J Yang, O Beijbom, PointPillars: Fast Encoders for Object Detection from Point Clouds, CVPR 2019
[3] Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas, PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation, CVPR 2017
サポート関数
function datasetPath = downloadSydneyUrbanObjects(dataLoc) if nargin == 0 dataLoc = pwd(); end dataLoc = string(dataLoc); url = "http://www.acfr.usyd.edu.au/papers/data/"; name = "sydney-urban-objects-dataset.tar.gz"; if ~exist(fullfile(dataLoc,"sydney-urban-objects-dataset"),"dir") disp("Downloading Sydney Urban Objects Dataset..."); untar(url + name,dataLoc); end datasetPath = dataLoc.append("sydney-urban-objects-dataset"); end function ds = loadSydneyUrbanObjectsData(datapath,folds) % loadSydneyUrbanObjectsData Datastore with point clouds and % associated categorical labels for Sydney Urban Objects dataset. % % ds = loadSydneyUrbanObjectsData(datapath) constructs a datastore that % represents point clouds and associated categories for the Sydney Urban % Objects dataset. The input, datapath, is a string or char array which % represents the path to the root directory of the Sydney Urban Objects % Dataset. % % ds = loadSydneyUrbanObjectsData(___,folds) optionally allows % specification of desired folds that you wish to be included in the % output ds. For example, [1 2 4] specifies that you want the first, % second, and fourth folds of the Dataset. Default: [1 2 3 4]. if nargin < 2 folds = 1:4; end datapath = string(datapath); path = fullfile(datapath,"objects",filesep); % For now, include all folds in Datastore foldNames{1} = importdata(fullfile(datapath,"folds","fold0.txt")); foldNames{2} = importdata(fullfile(datapath,"folds","fold1.txt")); foldNames{3} = importdata(fullfile(datapath,"folds","fold2.txt")); foldNames{4} = importdata(fullfile(datapath,"folds","fold3.txt")); names = foldNames(folds); names = vertcat(names{:}); fullFilenames = append(path,names); ds = fileDatastore(fullFilenames,ReadFcn=@extractTrainingData,FileExtensions=".bin"); end function dataOut = extractTrainingData(fname) [pointData,intensity] = readbin(fname); [~,name] = fileparts(fname); name = string(name); name = extractBefore(name,"."); labelNames = ["4wd","bench","bicycle","biker",... "building","bus","car","cyclist","excavator","pedestrian","pillar",... "pole","post","scooter","ticket_machine","traffic_lights","traffic_sign",... "trailer","trash","tree","truck","trunk","umbrella","ute","van","vegetation"]; label = categorical(name,labelNames); dataOut = {pointCloud(pointData,"Intensity",intensity),label}; end function [pointData,intensity] = readbin(fname) % readbin Read point and intensity data from Sydney Urban Object binary % files. % names = ["t","intensity","id",... % "x","y","z",... % "azimuth","range","pid"] % % formats = ["int64", "uint8", "uint8",... % "float32", "float32", "float32",... % "float32", "float32", "int32"] fid = fopen(fname, "r"); c = onCleanup(@() fclose(fid)); fseek(fid,10,-1); % Move to the first X point location 10 bytes from beginning X = fread(fid,inf,"single",30); fseek(fid,14,-1); Y = fread(fid,inf,"single",30); fseek(fid,18,-1); Z = fread(fid,inf,"single",30); fseek(fid,8,-1); intensity = fread(fid,inf,"uint8",33); pointData = [X,Y,Z]; end function dataOut = formOccupancyGrid(data) grid = pcbin(data{1},[32 32 32]); occupancyGrid = cellfun(@(c) ~isempty(c),grid); label = data{2}; dataOut = {occupancyGrid,label}; end