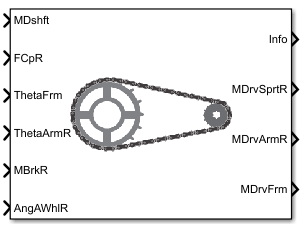
Motorcycle Chain
ライブラリ:
Powertrain Blockset /
Drivetrain /
Couplings
Vehicle Dynamics Blockset /
Powertrain /
Drivetrain /
Couplings
説明
Motorcycle Chain ブロックは、オートバイ チェーンが Motorcycle Body Longitudinal In-Plane ブロックに及ぼす動的な影響 (動的張力、モーメント駆動カップリングなど) を実装します。
次の図は、チェーンとオートバイのフレーム、リア アーム、および後輪との幾何学的な関係を示しています。
| フレーム | 図内の変数 | 説明 |
|---|---|---|
オートバイのメイン フレーム
| OFrm | メイン フレームの原点 |
例

オートバイ縦断面ブレーキ テスト リファレンス アプリケーション
ブレーキ テストにおけるオートバイ断面モデルをシミュレート。オートバイ運動の走行およびハンドリング解析やシャシー制御開発に使用。
端子
入力
出力
パラメーター
参照
[1] Giner, David Moreno. “Symbolic-Numeric Tools for the Analysis of Motorcycle Dynamics. Development of a Virtual Rider for Motorcycles Based on Model Predictive Control.” PhD diss., Universidad Miguel Hernández de Elche, 2016.
拡張機能
バージョン履歴
R2021b で導入