Barometer
ライブラリ:
UAV Toolbox /
UAV Scenario and Sensor Modeling
説明
例
barometerSimulation.slx Simulink モデルを開きます。
open_system("barometerSimulation");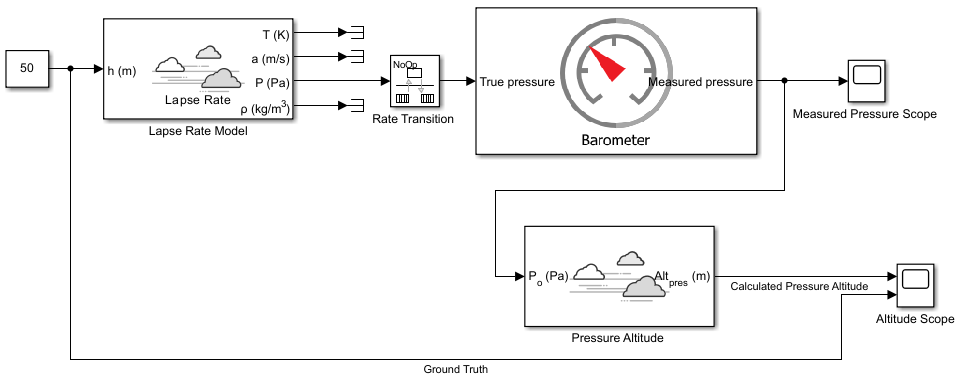
このモデルは次のブロックで構成されます。
Lapse Rate Model (Aerospace Blockset) — 逓減率大気モデルをシミュレーションします。このブロックは、高度をメートル単位で受け取り、大気圧をパスカル単位で出力します。この大気圧が気圧計センサーで測定されます。このモデルでは、入力高度は 50 メートルです。
Rate Transition — 気圧計センサーの離散測定をシミュレーションします。このモデルでは、ブロックにサンプル時間 0.1 秒が構成されています。
Barometer — 定数測定バイアス、無相関なホワイト ノイズ、および相関ノイズで構成される測定ノイズを含む気圧の読み取り値をパスカル単位で生成する気圧計センサーをシミュレーションします。
Pressure Altitude (Aerospace Blockset) — 気圧の読み取り値に基づいて、平均海面からの高度をメートル単位で計算します。
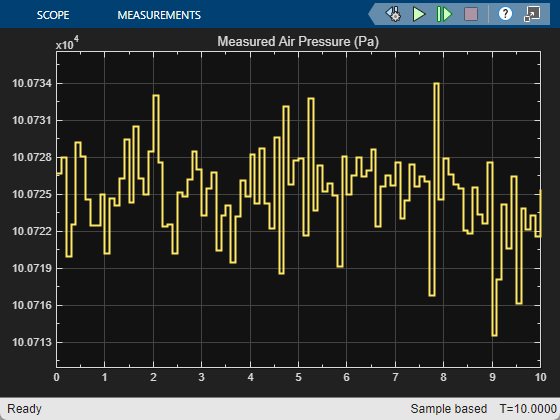
Measured Pressure Scope — 圧力の読み取り値を可視化します。
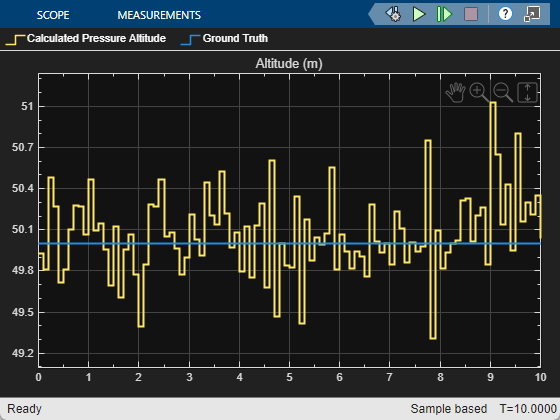
Altitude Scope — 計算された平均海面からの高度とグラウンド トゥルースを可視化します。
モデルを実行し、Scope ブロックを開いてシミュレーション結果を確認します。
端子
入力
出力
パラメーター
アルゴリズム
参照
[1] Sabatini, A.M., and V. Genovese. “A Stochastic Approach to Noise Modeling for Barometric Altimeters.” Sensors 13 (November 2013): 15692-15707. https://doi.org/10.3390/s131115692
バージョン履歴
R2025a で導入