QGroundControl からの PX4 Autopilot のハードウェアインザループ (HITL) モード設定
PX4® Autopilot は、HITL シミュレーション用に設定する前にハードウェアインザループ (HITL) モードで構成する必要があります。このワークフローは、ハードウェアインザループ シミュレーション (HITL) に基づいています。
HITL モードでの PX4 Autopilot の設定
次の手順を実行して、QGroundControl (QGC) を構成および設定します。
USB を介して Autopilot を QGC に接続します。
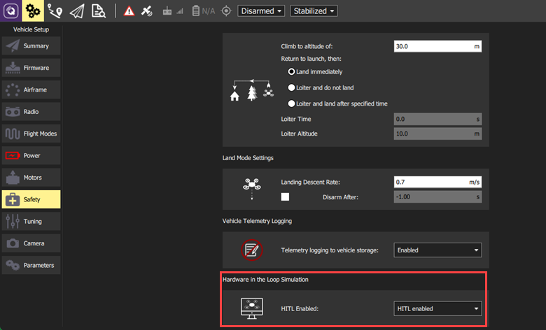
HITL モードを有効にします。
[Vehicle Setup]、[Safety] セクションに移動します。
[HITL Enabled] リストから [Enabled] を選択します。HITL モードを無効にする場合は、[HITL Enabled] リストから [Disabled] を選択します。
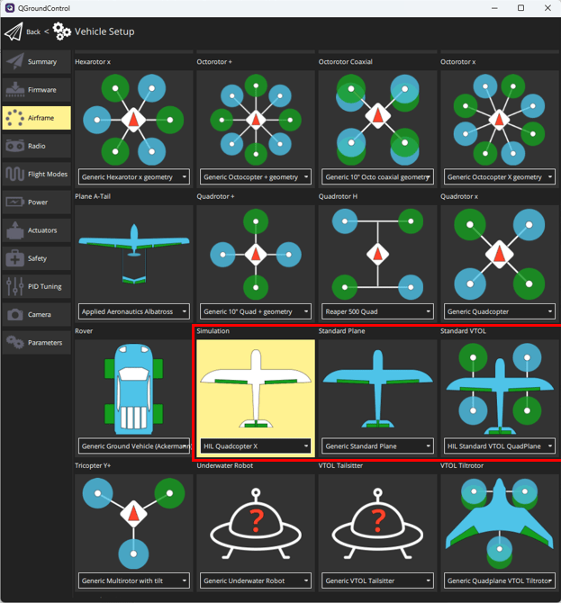
機体を選択します。
[Setup]、[Airframes] に移動します。
要件に最も適合する機体を選択します。
クワッドコプターをシミュレーションするには
[HIL QuadCopter x]。固定翼航空機をシミュレーションするには
[Generic Standard Plane]。VTOL をシミュレーションするには
[HIL Standard VTOL QuadPlane]。
[Airframe Setup] ページの右上にある [Apply and Restart] をクリックします。
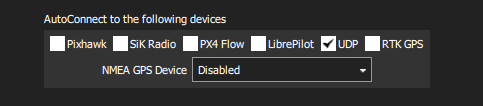
[Application] 設定メニューの [General] タブで、[UDP] を除くすべての [AutoConnect] オプションをオフにします。
メモ
この選択により、QGC と PX4 Autopilot の間の USB を介した通信が停止されます。QGC は UDP 経由でのみ通信できるようになりました (これは通常、QGC と Autopilot の間のブリッジとして機能し、MAVLink データを QGC と Autopilot の間で UDP 経由でルーティングするシミュレーターによって処理されます)。
メモ
この選択は HITL モードの場合にのみ行われます。Speedgoat® モデルを実行するには、[Pixhawk] オプションも選択してください。
バーチャル ジョイスティックを選択します。
[General] タブの設定メニューの [Fly View] から、[Virtual Joystick] オプションを選択します。
[Vehicle Setup] タブで、ジョイスティックとフェールセーフを構成します。次のパラメーターを設定して、RC リモート コントロール送信機の代わりにジョイスティックを使用します。
COM_RC_IN_MODE を
Joystick onlyにします。これにより、ジョイスティック入力が可能になり、RC 入力チェックが無効になります。COM_DISARM_LAND を
-1にします。これにより、QGC が着陸を検出した際の自動解除のタイムアウトが無効になります。これは、ドローンのモーターが離陸後の最高点で一時的に停止した際に PX4 のフェールセーフが発生する可能性を回避するのに役立ちます。NAV_ACC_RAD を
10にします。
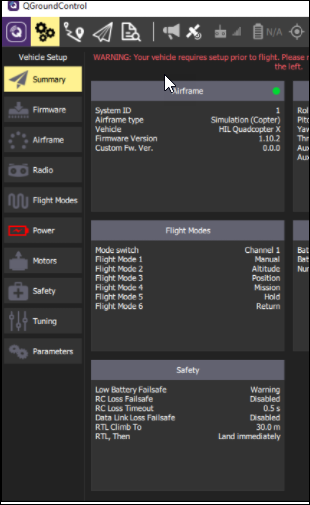
QGC の [Vehicle Settings] タブに警告がないことを確認します。[Power] タブのみ、赤色 (警告あり) でもかまいません。[Flight Modes] タブに警告が表示されている場合は、チャネルごとにモードを選択して設定します。場合によっては、[Sensor Calibration] タブが赤色になっていることがあります。そのまま進めてもかまいません。
メモ
SD カードがハードウェアに挿入されていて、QGC からのミッション アップロードが機能することを確認します。
Pixhawk® ハードウェアの TELEM1、TELEM2、または TELEM3 ポートで Controller モデルの監視と調整シミュレーションを実行する場合は、これらのポートで MAVLink が有効になっていないことを確認します。これを確認するには、パラメーター
MAV_0_CONFIGおよびMAV_1_CONFIGの値をチェックします。これらのパラメーターのポート値は、監視と調整シミュレーションの実行時には無効になっている必要があります。QGC を閉じます。
参考
Deployment and Verification Using PX4 Host Target and jMAVSim/Simulink