このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
IMUおよび環境センサーからデータを読み取る
この例では、BOOSTXL-SENSORS BoosterPack™ プラグイン モジュールの一部である BMI160 慣性計測ユニット (IMU) センサーと BME280 環境センサーからデータを C2000™ Microcontroller Blockset を使用して読み取る方法を示します。
この例では、F28379D LaunchPadにブレークアウトボードとして接続された別の BMM150 地磁気センサーからデータを読み取る方法も示します。
必要なハードウェア
Texas Instruments™ F28379D LaunchPad。
BOOSTXL-SENSORS BoosterPack™ プラグイン モジュールには、BMI160 慣性測定センサー、BMM150 地磁気センサー、BME280 環境センサーが内蔵されています。
I2C ベースのボード上の BMM150 地磁気センサーをブレークアウトボードとして F28379D LaunchPadに接続します。
はじめに
この例では、ハードボードとして TI Delfino F28379D Launchpad を使用する 3 つの Simulink モデルを示します。
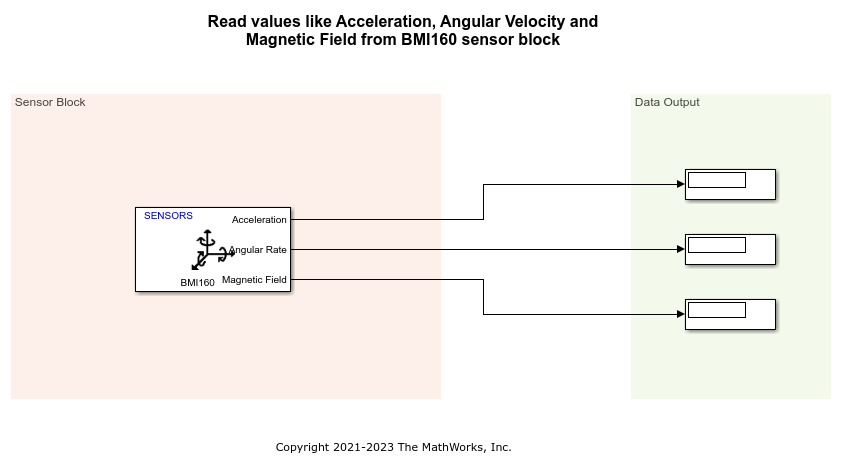
c28x_i2c_bmi160_sensorは、BOOSTXL-SENSORSモジュールのBMI160とBMM150センサーの両方から測定された加速度、角速度、磁場を読み取るのに役立ちます。
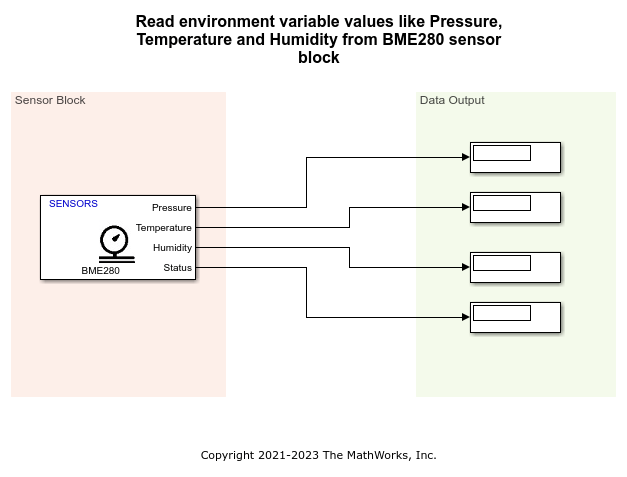
c28x_i2c_bme280_sensorは、BOOSTXL-SENSORSモジュールのBME280センサーから測定されたデジタル圧力と相対湿度を読み取るのに役立ちます。
c28x_i2c_bmm150_sensorは、ブレークアウトボードとしてF28379D LaunchPadに接続されたBMM150センサーから測定された磁場を読み取るのに役立ちます。
BMI160センサーおよびBME280センサーからデータを読み取るためのモデル構成
この例で提供される BMI160 センサーからデータを読み取るためのモデルは、ブロックセットで提供される対応するブロック BMI160 を使用します。
c28x_i2c_bmi160_sensor モデルを開きます。
モデル内の BMI160 ブロックでは、I2C モジュールパラメーターが I2C_A に設定されています。したがって、クロック周波数を変更するには、必要に応じて設定を変更してください。これを実行するには:
1. [ハードウェア] タブに移動し、[ハードウェア設定] をクリックして、[構成パラメーター]ダイアログ ボックスを開きます。
2. ハードウェア実装 > ターゲット ハードウェア リソース に移動し、I2C_A タブを選択します。
3. 必要に応じて値を編集してクロック周波数を変更します。

4. [適用] をクリックし、次に *[OK] をクリックします。
この例で BME280 センサーからデータを読み取るために提供されている他のモデルは、ブロックセットで提供される対応するブロック BME280 を使用します。
c28x_i2c_bme280_sensor モデルを開きます。
上記のモデルの BME280 ブロックでは、I2C モジュールパラメーターが I2C_A に設定されています。したがって、クロック周波数を変更するには、必要に応じて、BMI160 で説明したのと同じ手順に従って設定を変更します。
また、BME280 ブロック内の 詳細設定 の下にあるさまざまなオプションを使用して、フィルタリング係数とサンプリング係数の値を変更することもできます。
メモ: 2 つのモデルの各ブロック (BMI160 および BME280) で選択された I2C アドレスパラメーター値は、『BOOSTXL-SENSORS BoosterPack プラグイン モジュール ユーザー ガイド』の 回路図 セクションに記載されている情報に対応しています。
ハードウェア接続を完了し、BMI160センサーからデータを読み取る
c28x_i2c_bmi160_sensor モデルの構成設定を完了したら、次の手順を実行します。
1. BOOSTXL-SENSORS プラグイン モジュールを F28379D LaunchPadに接続します。F28379D Launchpad の GPIO104 ピンと GPIO105 ピンをそれぞれ BOOSTXL-SENSORS の J1.10 (SDA) ピンと J1.9 (SCL) ピンに接続し、VDD や GND などのその他の必要な接続を完了します。詳細については、『BOOSTXL-SENSORS BoosterPack プラグイン モジュール ユーザー ガイド』の「回路図」セクションを参照してください。
2. F28379D LaunchPad をホスト コンピューターに接続します。
2. c28x_i2c_bmi160_sensor モデルの 構成パラメーター ウィンドウで、ハードウェア実装 をクリックし、ターゲット ハードウェア リソース > 外部モード に移動して、MATLAB 設定のシリアル ポートパラメーターを、Launchpad が接続されている対応する COM ポートに設定します。COM ポートは、Windows の デバイス マネージャー > ポート (COM および LTP) で使用できます。
3. F28379D Launchpad からの実際のハードウェア接続に基づいて BOOSTXL-SENSORS と通信するには、ハードウェア実装 > I2C_A ペインで SDA および SCL に適切な GPIO ピンを選択します。

4. Simulink モデルの [ハードウェア] タブで、[モニターとチューニング] をクリックします。診断ビューアーから、モデルのコードが生成され、生成された実行可能ファイルの読み込み後にホストがターゲットに接続されることを確認できます。
5. ボードを軸を中心に回転させます。ブロックの Angular Rate 出力に接続された Display ブロックに表示される値が変化していることがわかります。
6. ボードの向きを変更します。ブロックの Acceleration 出力に接続された Display ブロックに表示される値が変化していることがわかります。
ハードウェア接続を完了し、BME280センサーからデータを読み取る
c28x_i2c_bme280_sensor モデルの構成設定が完了したら、前のセクションで説明したのと同じ手順 1 ~ 4 を実行して接続を指定し、モデルを外部モードで実行します。
次に、ブロックの 圧力、温度、および 湿度 出力ポートに接続された Display ブロックに表示される値を確認します。これらの値は電流の環境条件に対応しています。
ブレイクアウトボードとして接続された BMM150 センサーからデータを読み取るためのモデル構成
この例で BMM150 センサーからデータを読み取るために提供されているモデルは、ブロックセットに付属する対応するブロック BMM150 を使用します。
c28x_i2c_bmm150_sensor モデルを開きます。

上記のモデルの BMM150 ブロックでは、I2C モジュールパラメーターが I2C_A に設定されています。したがって、クロック周波数を変更するには、必要に応じて、BMI160 で説明したのと同じ手順に従って設定を変更します。
また、BMM150 ブロック内の プリセット値パラメーターのさまざまなオプションを使用して、最適な動作条件を指定することもできます。
使用できるボードは、I2C インターフェースを使用する BMM150 ベースのデジタル コンパス センサーです。F28379D LaunchPadへの I2C 接続についてはボードの仕様を参照し、それに応じて I2C アドレスパラメーターの値を指定します。
ハードウェア接続を完了し、BMM150センサーからデータを読み取る
c28x_i2c_bmm150_sensor モデルの構成設定を完了したら、次の手順を実行します。
1. BMM150 センサーを搭載した I2C ベースのボードをF28379D LaunchPadに接続し、その他の必要な接続を完了します。
2. F28379D LaunchPad をホスト コンピューターに接続します。
2. c28x_i2c_bmm150_sensor モデルの 構成パラメーター ウィンドウで、ハードウェア実装 をクリックし、ターゲット ハードウェア リソース > 外部モード に移動して、MATLAB 設定のシリアル ポートパラメーターを、Launchpad が接続されている対応する COM ポートに設定します。COM ポートは、Windows の デバイス マネージャー > ポート (COM および LTP) で使用できます。
3. F28379D Launchpad からの実際のハードウェア接続に基づいて I2C ベースのインターフェイスと通信するには、[ハードウェア実装] > [I2C_A] ペインで SDA および SCL に適切な GPIO ピンを選択します。
4. Simulink モデルの [ハードウェア] タブで、[モニターとチューニング] をクリックします。診断ビューアーから、モデルのコードが生成され、生成された実行可能ファイルの読み込み後にホストがターゲットに接続されることを確認できます。
5. ブロックの Magnetic Field 出力に接続された Display ブロックの電流の値を確認します。ボードの位置を変更します。Display ブロックに表示される値が変化していることがわかります。