このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
ピーク電流モード制御を使用したデジタルDC/DC降圧コンバータ
この例では、 Texas Instruments ™ C2000™ Microcontroller Blockset のピーク電流モード制御 (PCMC) を使用して、Comparator Subsystem (CMPSS) を使用して降圧コンバータの出力電圧 (BOOSTXL-BUCKCONV) を調整する方法を示します。この例では以下を行うことができます。
インダクタ電流センスフィードバック (ILFB) 信号を監視するように CMPSS を構成します。
過電流状態でトリップするように拡張パルス幅変調器 (ePWM) を構成します。
コントローラーのコードを生成し、ハードウェアボードにロードします。
ホスト コンピュータ上で信号を監視し、パラメーターを調整します。
はじめに
この例では、CMPSS、 ePWM、およびADC (アナログ デジタル コンバーター) サブシステムを使用して、PCMC で同期降圧操作を実行します。
各 PWM サイクルは、ピーク電流しきい値に達するまでePWM をハイ (PWM-HI) に駆動することから始まり、その後、PWM サイクルの残りの間、PWM-HI 信号はローに駆動されます。
ePWM1 モジュールはADC変換をトリガーし、200kHz の周波数でプラントのフィードバック信号を感知します。
ADC ISR はピーク電流制限の変更を計算します。
オンチップアナログ CMPSS は、設定されたピーク電流制限に対して電流センス フィードバック (ILFB) 信号を継続的に監視するように構成されています。
制御補償器アクセラレータ(CLA) は、PCMC制御アルゴリズムを実行します。

必要なハードウェア
9V外部電源
マイクロUSBケーブル
利用可能なモデル
f280049C_DCDC_Buck_PCMC -
Digital DC/DC Buck Converter Peak Current Mode Control (PCMC)を使用してコードを生成し、F80049C LaunchPadにロードできます。c2000_host_read_PCMC -
Host PCMC Modelをホスト コンピュータ上で実行して、信号を記録し、パラメーターを調整できます。
ハードウェアの接続
次の表に示すように、デジタル電源降圧コンバータ BoosterPack (BOOSTXL-BUCKCONV) をTexas Instruments Piccolo F280049C LaunchPadに接続します。詳細については、C2000 デジタル電源ブースターパックを参照してください。
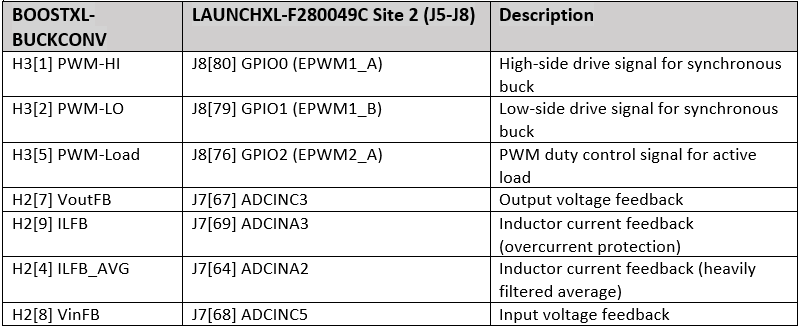
メモ: ランチパッド上の JP8 のピン +3v3 と J5 の間にジャンパーが存在することを確認します。
モデル
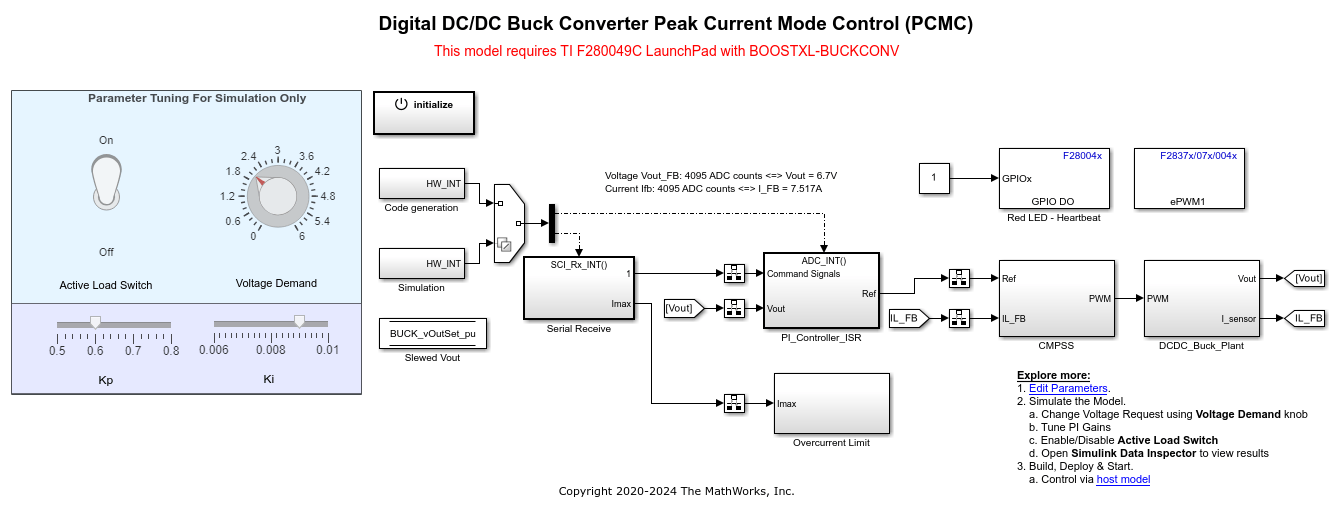
デジタル DC/DC 降圧コンバータ ピーク電流モード制御 (PCMC) モデル
f280049C_DCDC_Buck_PCMC モデルを開きます。
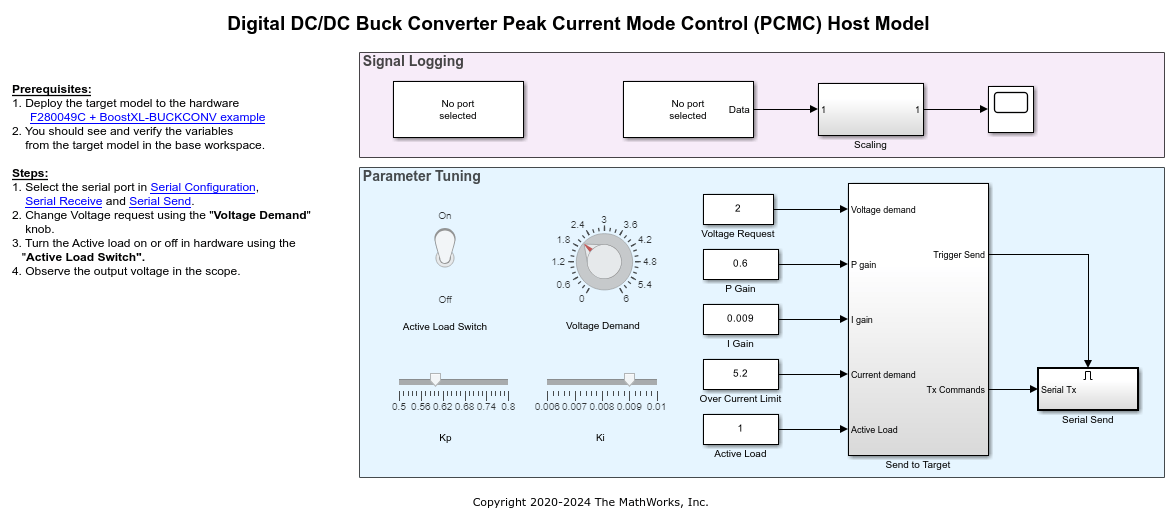
C2000_host_read_PCMC モデル
c2000_host_read_PCMC モデルを開きます。
この例では、固定入力電圧 9 V DC と出力電圧設定点 2 V DC での PCMC の動作を示します。したがって、上記の電圧に適用可能な固定のスロープ補償値が計算されます。詳細については、TI マニュアル「Digital Peak Current Mode Control With Slope Compensation」を参照してください。
シミュレーション用に、RAMP ジェネレータが実装されており、SR フリップフロップ ブロックを使用して PWM を生成し、Simulink ® にコンパレータ ロジックを実装します。
デジタルDC/DC降圧コンバータのピーク電流モード制御(PCMC)モデルの構成と実行
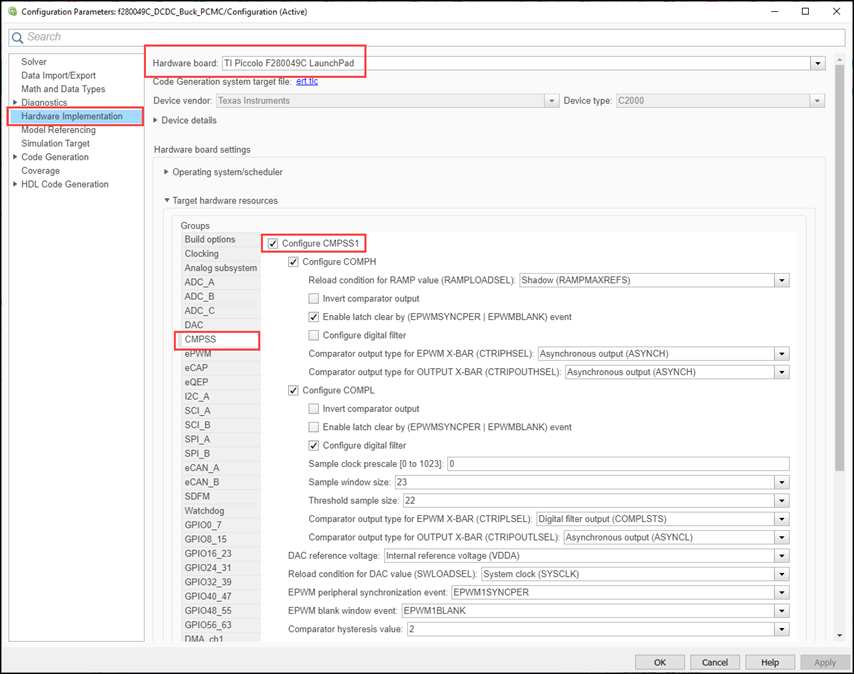
1. f280049C_DCDC_Buck_PCMC モデルを開きます。このモデルは、TI Piccolo F280049C LaunchPadハードウェア用に構成されています。
2. 他の TI C2000 プロセッサでモデルを実行するには、まず Ctrl+E を押して [構成パラメーター]ダイアログ ボックスを開きます。次に、[ハードウェア実行]、[ハードウェア ボード] に移動して、必要なハードウェア ボードを選択します。
メモ: デジタル電源降圧コンバータ BoosterPack が正しいピン マッピングを使用して選択したハードウェアボードに接続されていることを確認します。
3. 次のスクリーンショットは、モデルで実行された CMPSS 構成を示しています。この例を他のハードウェアボードで実行する場合には、同じパラメーター値を使用できます。
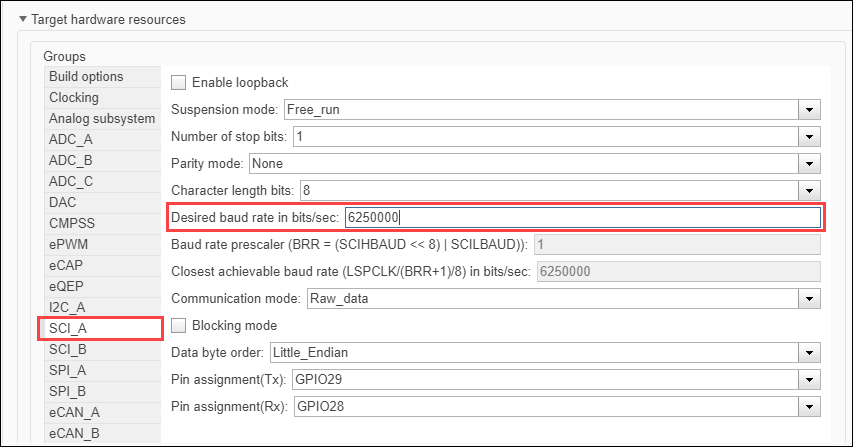
4. ボーレートが 6250000 ビット/秒に設定されていることを確認します。
周辺装置ブロックの構成
このモデルのペリフェラル ブロック構成を設定します。ブロックをダブルクリックして、ブロックパラメーター構成を開きます。この例を他のハードウェアボードで実行する場合には、同じパラメーター値を使用できます。
ePWMブロック
デジタル比較イベントに基づいて波形を生成するようにePWMアクション修飾子を構成します。CMPSS モジュールによって生成されるトリップ信号を、ePWMA を低にトリップするように設定します。


CMPSS 出力はフィルターを通過し、ブランキング ウィンドウも使用されるため、次の図に示すように、 ePWM はノイズやスプリアス信号に応答しません。



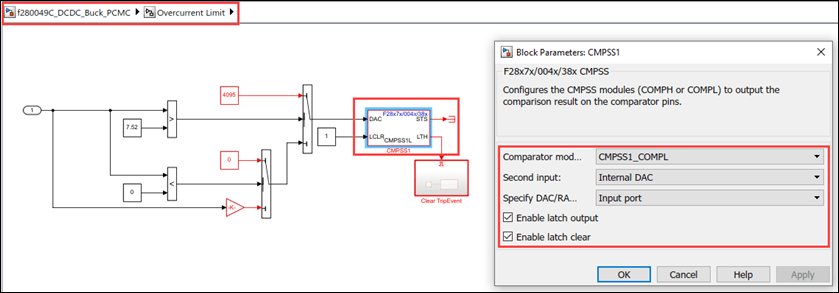
過電流制限時の CMPSS ブロック
過電流ロジックは、過電流状態になると出力をトリップします。過電流保護はピーク電流ループに固有のものですが、アプリケーションは MCU 上の予備のコンパレータ リソースを使用して冗長保護パスを実装します。このトリップは、 ePWMでワンショット トリップ用に設定されています。出力を再度有効にするには、トリップ フラグをクリアします。
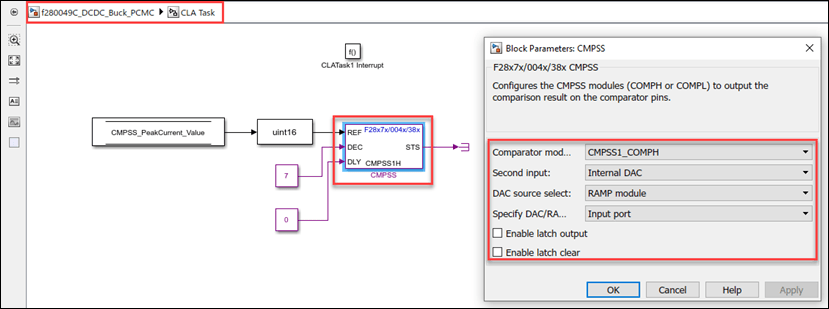
CLAタスクのCMPSSブロック
PCMC制御アルゴリズムは CLA モジュールによって実行され、アルゴリズムの実行時に CPU への割り込みが生成されます。計算されたピーク電流しきい値を持つ CMPSS は、CLA 割り込みルーチン内で更新されます。CLA 構成の詳細については、Using the Control Law Accelerator (CLA) を参照してください。
コンパレータは、ピーク電流しきい値に対するインダクタのフィードバック電流を監視します。電流制限に達すると、 ePWMのトリップ信号を生成します。
コンパレータのピーク電流しきい値は、リファレンス DAC によって提供されます。ランプジェネレータを使用して、 ePWMに同期したリファレンス DAC 値を制御する
RAMP 信号の傾きを定義する RAMP 減分値は 7 に固定されています。この固定勾配は、PCMC を使用したプラントの動作のダイナミック範囲全体をカバーしない可能性があります。
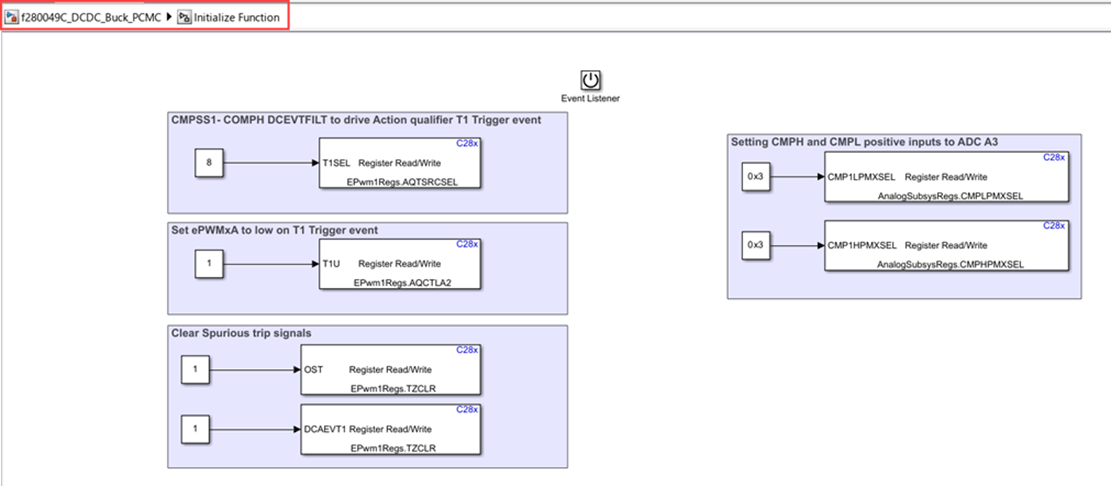
コンパレータ出力に基づいてePWM を切り替えるには、モデルの Initialize サブシステムで次の構成を行います。
1. CMPSSH および CMPSSL の正入力は、アナログ サブシステム レジスタを使用してADC出力に接続されます。
2. CMPSSH 出力は、フィルタリングされたバージョンがePWM T1 イベントのソースとして機能するデジタル比較イベント (DCEVT) を作成するために使用されます。これは AQTSRCSEL レジスタを使用して行われます。
3. ePWM T1 イベントが発生すると、 ePWMは低く設定されます。この設定は AQCTLA2 レジスタを使用して行われます。
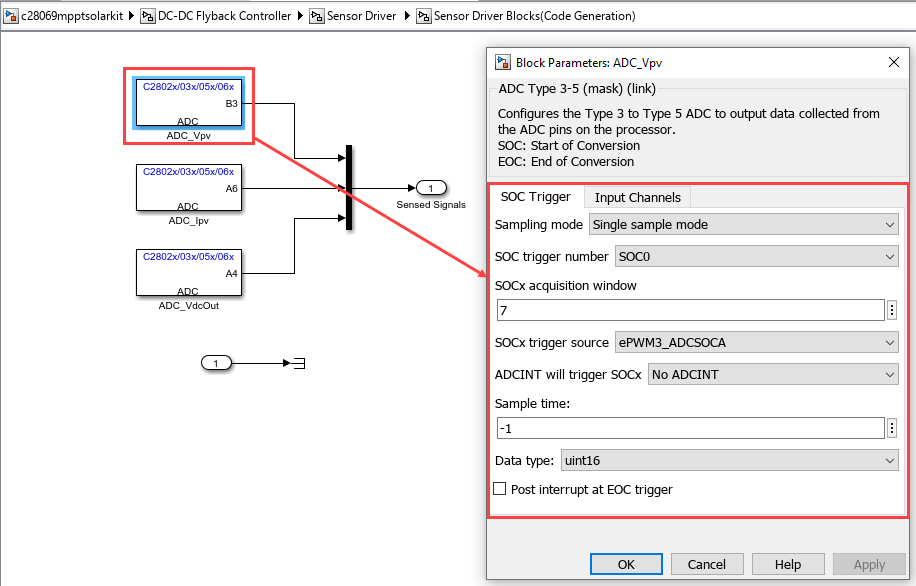
PI コントローラ ISR のADCブロック
ePWM はADCの変換開始 (SOC) イベントをトリガーして出力電圧をサンプリングします。ADC会話終了 (EOC) 割り込みは、システム内のエラーに応じて作動値を計算するデジタル制御アルゴリズムを実行します。
DC/DC降圧コンバータプラントモデルのピーク電流モード制御のシミュレーション
モデルの実行
1. f280049C_DCDC_Buck_PCMC モデルを開きます。
2. [シミュレーション] タブの [実行] をクリックして、モデルをシミュレートします。
3. [シミュレーション] タブの [データ インスペクター] をクリックし、シミュレーション結果を表示して解析します。ダッシュボード コントロールを使用して入力パラメーターを調整できます。
コントローラ用のコードを生成し、ハードウェアボードにロードする
1. モデル f280049C_DCDC_Buck_PCMC のコードを生成するには、Ctrl+B を押すか、[ビルド、デプロイ & 開始] をクリックします。

2. モデル キャンバスの下部に示されるリンクを使用して診断ビューアーを開き、ビルド プロセスに従います。ボードにコードをロードすると、ハードウェアボード上の赤い LED が点滅し、コードが実行中であることが示されます。
ホストコンピュータで信号を監視し、パラメーターを調整する
ホストコンピュータ上でモデルを構成して実行する
1. ホスト コンピューターで、デバイス マネージャー > ポート (COM と LPT) に移動して COM ポートを見つけます。

2. c2000_host_read_PCMC モデル内の次のブロックの COM ポートを、ホスト コンピュータの COM ポートと一致するように設定します。
c2000_host_read_PCMC > シリアル受信
c2000_host_read_PCMC > シリアル送信 > シリアル送信1
3. モデルを実行するには、実行 ボタンをクリックします。
パラメーターの調整
モデルの実行中に、次のダッシュボード ブロックを使用してパラメーターを調整できます。
電圧要求 - 出力電圧の要求を変更します。このパラメーターは制御ループの主な要求です。コントローラ アルゴリズムは、電圧要求値と測定された出力電圧を比較し、出力電圧を実現するように PWM デューティ サイクルを調整します。
P ゲイン - コントローラー アルゴリズムの比例ゲインを変更します。このパラメーターを変更して、コントローラーの堅牢性を調べることができます。大きく急激な変更はコントローラーの不安定化につながる可能性があります。変更はスムーズに適用してください。
I ゲイン - コントローラー アルゴリズムの積分ゲインを変更します。このパラメーターを変更して、コントローラーの堅牢性を調べることができます。大きく急激な変更はコントローラーの不安定化につながる可能性があります。変更はスムーズに適用してください。
過電流制限 - 過電流設定点をコンバータで動作している電流よりも小さく変更します。たとえば、コントローラが Vout を 2 V に調整しているときに、過電流制限を 1.2 A にプログラムしてみます。これにより、過電流状態が発生したときにプラントへの出力がトリップするはずです。
アクティブ ロード - ハードウェア上のアクティブ ロードをオンまたはオフにします。このパラメーターを使用すると、負荷回路の急激な変化の影響を調べるために負荷抵抗器を追加できます。
信号を監視する
モデルの実行中に、Scope ブロックで次の信号を監視できます。
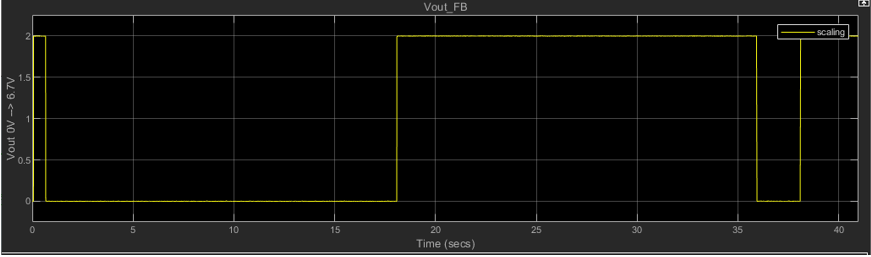
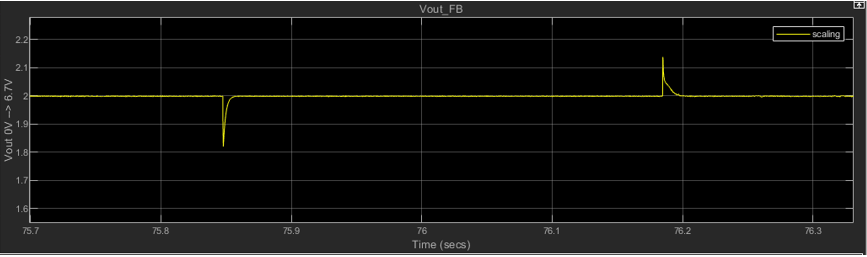
V_FB 電圧 - システムの測定出力電圧は 2 V です。
有効負荷:
トラブルシューティング
アクティブ負荷が有効な場合は、9 V DC 電源の入力電圧が安定していることを確認します。テストベンチのセットアップでは、入力電圧が 10 V に設定されているとアクティブ負荷が動作します。
ホストとターゲット間のシリアル接続で接続の問題が発生した場合は、TI Piccolo F280049C LaunchPad を切断してから再接続してみてください。
コンバータの電流が過電流設定点を超えると、出力がトリップし、PI コントローラが飽和状態になります。出力を再度有効にするには、以下の手順に従います。
過電流制限を 5.2 A などの高い値に設定します。
電圧設定点を 0 ボルトに設定してから、2 V に戻します。
その他の試行
異なる電圧設定点のスロープ補償を計算し、コンパレータを構成して例を実行します。