風力タービン
この例では、監視、ピッチ角、MPPT (最大電力点追従)、およびディレーティングの制御を使用して、風力タービンをモデル化、パラメーター化、およびテストする方法を示します。プロット関数を実行すると、状態遷移、正規化された物理量 (風速、風力タービン回転速度、発電機電力、ピッチ角など) のプロットが生成されます。
モデル
次の図は、風力タービンのモデルを示しています。機械ドメインおよび電気ドメインのそれぞれに独自の Solver Configuration ブロックが必要です。

Supervisory Control サブシステム
このサブシステムでは、風力タービン ステート マシンをモデル化する方法を示します。タービン ステート マシンでは、4 つの風力タービンの状態を定義します。
パーク ブレーキ モード: これは、風力タービン動作のエントリ モードです。タービン回転子速度が安全な動作のために許容される制限を下回ると、風力タービンはピッチ ブレーキ モードからパーク ブレーキ モードに入ります。このモードの間、発電機はトリップ状態であり、油圧パーク ブレーキはかかった状態で、風力タービンの回転子のブレードは空力ブレーキのためにブレーキ角に設定されています。油圧ブレーキは、風力タービンにブレーキをかけるための 2 次的な方法です。
起動モード: 風速が安全な動作のために許容される制限を下回ると、風力タービンはパーク ブレーキ モードから起動モードに入ります。風速およびタービン速度が許容される制限を下回ると、風力タービンはピッチ ブレーキ モードからこのモードに入ります。このモードの間、発電機はトリップ状態であり、油圧パーク ブレーキは解除されており、風力タービンの回転子のブレードは最大タービン回転子加速に達するために最小角度に設定されています。
発電モード: 風力タービン回転子速度がタービンのカットイン速度を上回ると、風力タービンは起動モードから発電モードに入ります。このモードの間、発電機は変圧器に接続されており、油圧パーク ブレーキは解除されており、風力タービンの回転子のブレードは動作状態に従って最適な発電を達成できるように設定されています。
ピッチ ブレーキ モード: 風速およびタービン回転速度が許容される制限を下回らなくなると、風力タービンは発電モードからピッチ ブレーキ モードに入ります。風速が許容される制限を下回らなくなると、風力タービンは起動モードからピッチ ブレーキ モードに入ります。このモードの間、発電機は変圧器に接続されて回転子のブレードで使用可能な運動エネルギーを消費し、油圧パーク ブレーキは解除された状態で、風力タービンの回転子のブレードは空力ブレーキのためにブレーキ角に設定されています。空力ブレーキは、風力タービンにブレーキをかけるための 1 次的な方法です。

Pitch Controller サブシステム
このサブシステムでは、風力タービンのピッチ角コントローラーをモデル化する方法を示します。
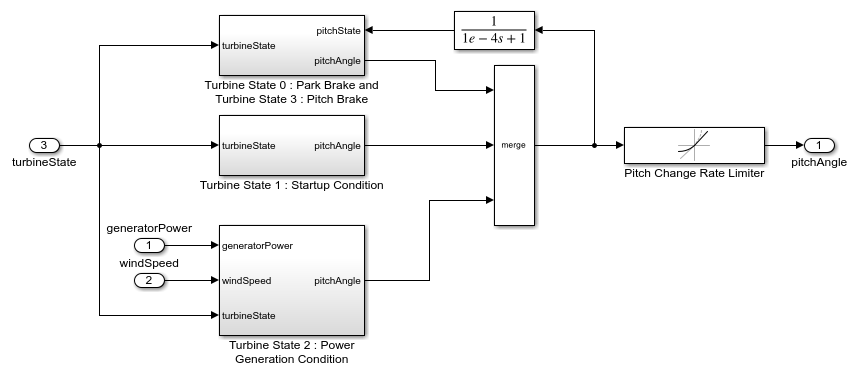
パーク ブレーキ/ピッチ ブレーキ モード: これらのモードの間、ピッチ角は空力ブレーキのために 95 度に設定されます。

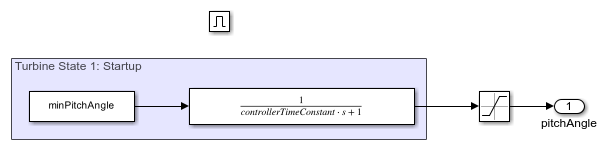
起動モード: このモードの間、ピッチ角は最大加速に達するために 1 度に設定されます。
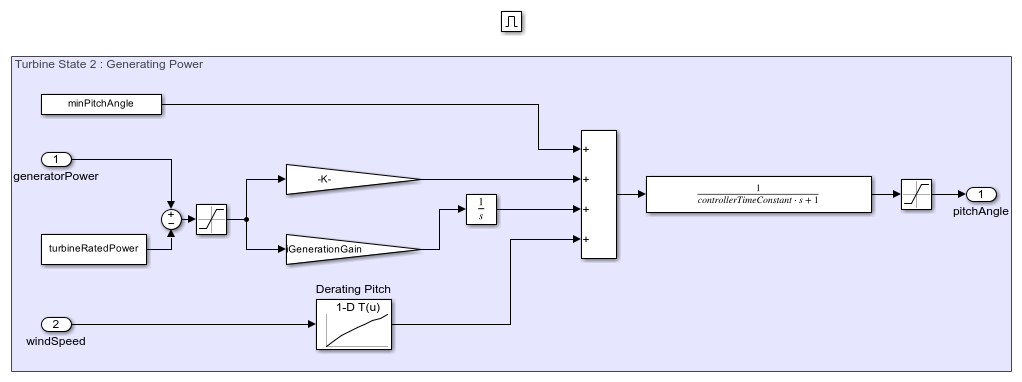
発電モード: このモードの間、ピッチ角は動作状態に従って最適な発電を達成できるように設定されます。
1. 定格風速まで、ピッチ角は最低の設定である 1 度のままになります。この制御は、風力タービンの MPPT 電力制御と同期して動作します。
2. 風速が定格風速を上回ると、風力タービンのディレーティング電力制御と同期してピッチ角が変更されます。
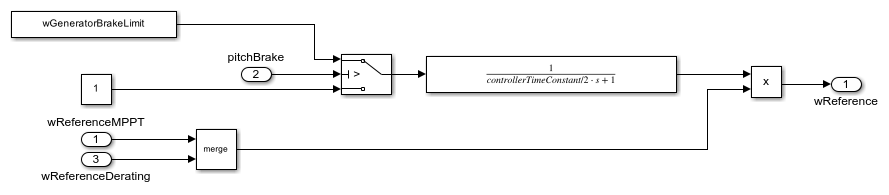
Power Controller サブシステム
このサブシステムでは、発電機を介して風力タービンで最適なトルク負荷を得るために電力需要および発電機の入力速度指令をモデル化する方法を示します。
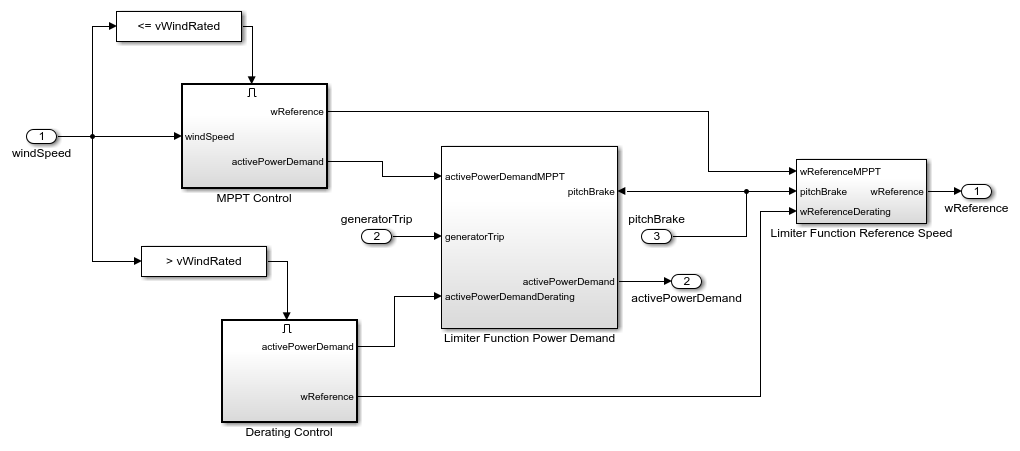
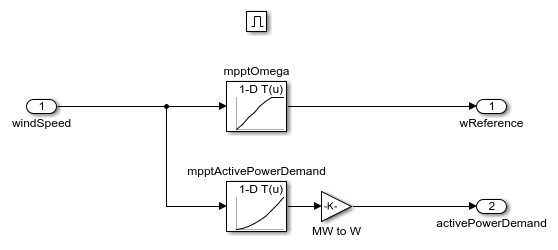
MPPT control: このモードは、定格風速までアクティブになります。電力需要と発電機の基準速度は、風力タービンの特性電力性能曲線に従います。
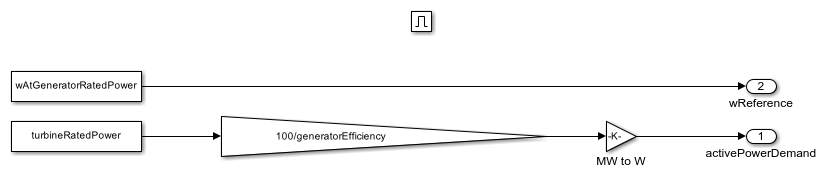
Derating control: このモードは、定格風速を上回っているときにアクティブになります。電力需要と発電機の基準速度は、風力タービンの定格に基づいて一定に保たれます。
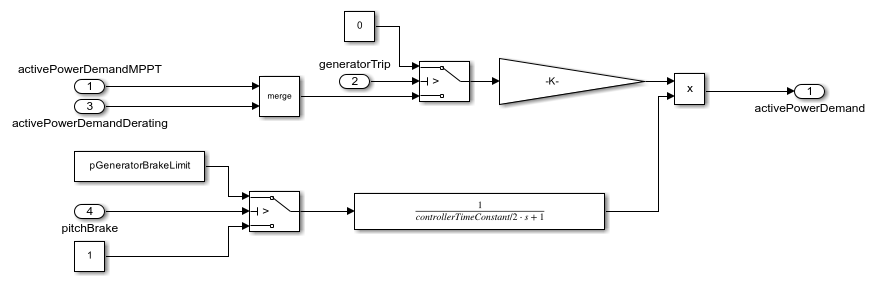
Limiter Function Power Demand: この関数は、風力タービンの動作モードに従って、電力需要を制限します。
Limiter Function Reference Speed: この関数は、風力タービンの動作モードに従って、速度指令を制限します。
Wind Turbine サブシステム
このサブシステムでは、風力タービンをモデル化する方法を示します。
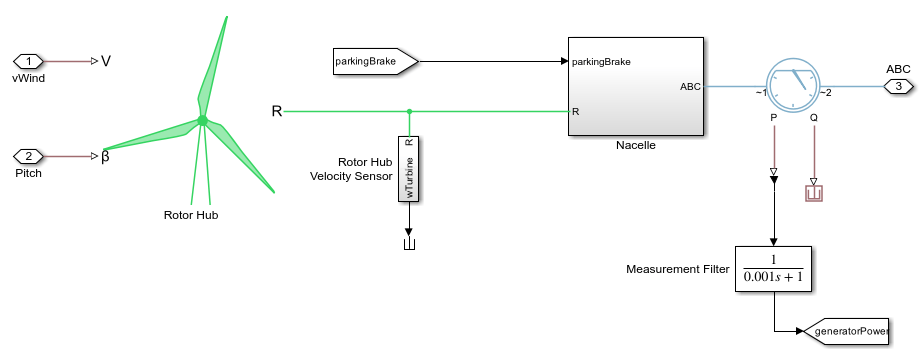
Rotor Hub: 横軸風力タービンの回転子は、Simscape™ Driveline™ Wind Turbine ブロックを使用してモデル化されます。このブロックでは、風 P から抽出される "機械動力" は次のように計算されます。

ここで、
"rho" は空気の密度です。
"Ar" は回転子のブレードによってスイープされる面積です。
"vWind" は風速です。
"cp" は lambda および pitch の関数としての電力係数です。
"lambda" は回転子のブレード先端の速度と風速の比であり、先端速度比 (TSR) とも呼ばれます。
"pitch" は回転子のブレードのピッチ角です。
Nacelle: このサブシステムでは、風力タービンのナセル コンポーネントをモデル化する方法を示します。
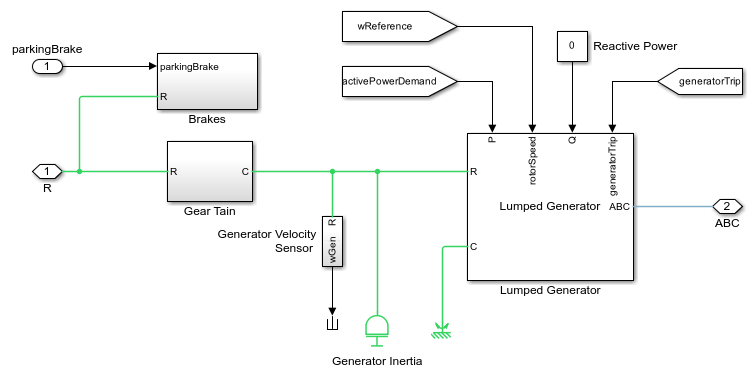
Brakes: このサブシステムでは、ナセル内のブレーキをモデル化する方法を示します。油圧ブレーキは、風力タービンにおける 2 次的なブレーキ方法です。風力タービンがパーク ブレーキ モードのときに風力タービンの速度がパーキング ブレーキ速度を下回ると、または風力タービンの保守作業時に、ブレーキがかかります。パーキング ブレーキ速度を上回っているときにブレーキがかかると、摩擦による過度な熱の発生のために、ブレーキが焼き切れたり、ナセルが燃えたりするおそれがあります。

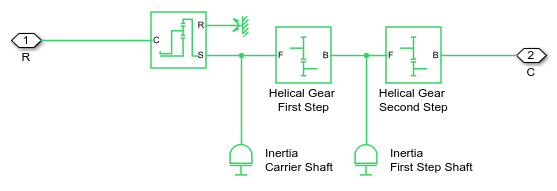
Gear Train: このサブシステムでは、ナセル内の歯車列をモデル化する方法を示します。遊星歯車列は、電力損失をもつ歯車列システムを表します。歯車列は、風力タービンの動作で高い電力損失に寄与しています。
Lumped Generator: このサブシステムでは、ナセル内の発電機をモデル化する方法を示します。これは、シミュレーションの速度を上げるために簡略化した発電機のモデルです。

風力タービンでは、従来型の二重供給誘導発電機 (DFIG) システムより時定数が大きく、応答が遅くなっています。風力タービン制御のシミュレーションを実行するには、より長い時間をかけてシミュレーションを実行しなければなりません。
閉ループ DFIG システムは、ピッチ制御などの風力タービン制御システムより高速です。したがって、忠実度の低い集中 DFIG 発電機システムは、シミュレーション速度の向上と柔軟性の提供のためには実用的です。集中発電機システムは風力タービン システムと統合され、制御アルゴリズムのさまざまな側面のシミュレーションを行います。
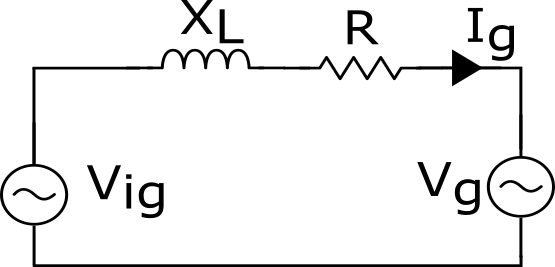
集中発電機モデルは、位相同期回路 (PLL) を使用して系統連系点 (PCC) におけるグリッド電圧と位相角を追跡します。シミュレーション速度を上げるには、グリッド電圧ゼロクロッシング検出を使用して、高速に動作する PLL をモデル化します。集中発電機では、PLL から得たグリッド電圧および位相を使用し、発電機の集中漏れインダクタンスおよび抵抗を用いて電力潮流方程式を実装します。集中発電機モデルは、有効電力 (P)、無効電力 (Q)、および基準発電機シャフト速度を入力として受け取ります。
風力タービン システムでは、集中発電機モデルは、風力タービン電力制御システムから電力指令および近似速度指令の入力を取得します。指令入力に基づいて、発電機は負荷トルクを風力タービンのシャフトに加え、電力をグリッドに供給します。






ここで、
 は PCC におけるグリッドの相電圧 (rms) です。
は PCC におけるグリッドの相電圧 (rms) です。 は PCC におけるグリッドの相電流 (rms) です。
は PCC におけるグリッドの相電流 (rms) です。 は PCC におけるグリッドのピーク相電圧です。
は PCC におけるグリッドのピーク相電圧です。 は PCC におけるグリッドのピーク相電流です。
は PCC におけるグリッドのピーク相電流です。 は、発電機のピーク誘導相電圧です。
は、発電機のピーク誘導相電圧です。 は、発電機の誘導相電圧です。
は、発電機の誘導相電圧です。 は、(固定子に関する) 誘導発電機の集中漏れリアクタンスです。
は、(固定子に関する) 誘導発電機の集中漏れリアクタンスです。 は、(固定子に関する) 誘導発電機の集中抵抗です。
は、(固定子に関する) 誘導発電機の集中抵抗です。 は瞬時グリッド電圧位相角です。
は瞬時グリッド電圧位相角です。
ここで、 および は PLL から取得されます。
集中発電機システム モデル ブロックは、固定周波数、完全な正弦波、および三相平衡グリッド接続システム以外では使用できません。このモデルは、フォルト ライド スルー (FRT) やグリッド周波数変動シミュレーションなどの過渡電気スティミュレーションには適していません。
Grid and Transformer サブシステム
このサブシステムでは、グリッドおよび変圧器をモデル化する方法を示します。シミュレーション速度を上げるために寄生コンダクタンスが追加されています。

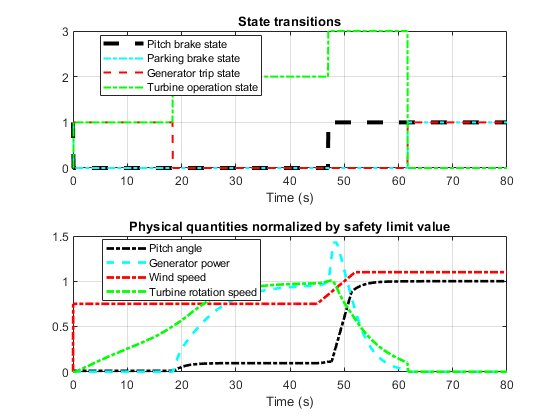
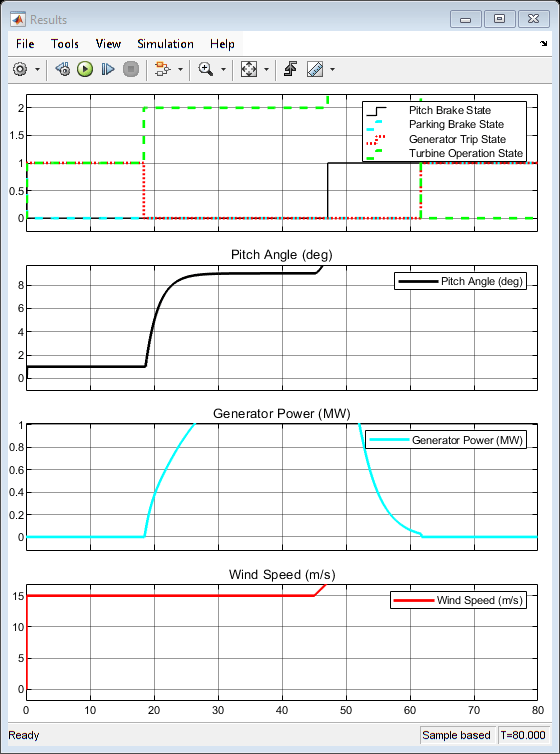
Scope からのシミュレーション結果
この図では、監視制御状態、タービンのブレードのピッチ角、発電機電力、および風速が示されています。
Simscape ログからのシミュレーション結果
このモデルでは、状態遷移、正規化された物理量 (風速、風力タービン回転速度、発電機電力、ピッチ角など) のプロットが生成されます。