Model Electric and Hybrid Electric Aircraft
This example shows how to evaluate architectures of electric and hybrid electric aircraft against design criteria like flight range and maximum flight time. You can modify many aspects of the design, including the battery size and payload. Electric aircraft is an active area of development in the aerospace industry. You can then select the power network architectures and size the components, based on the results of your analysis. You can also reduce the number of design iterations you need to meet system-level design requirements, by using parameter sweeps.
You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.
Example Overview
In this example, you learn how to:
Model an electric and hybrid electric aircraft power network.
Evaluate aircraft component sizes with respect to design requirements.
Modify design parameters to see how they affect flight range and maximum flight time.
This example parameterizes the aircraft configurations, power networks, and component sizes. You can test a single-seat light aircraft like Airbus E-Fan, double-seat light aircraft like Pipistrel Alpha Electro, or a custom design. You can sweep the design parameters, like battery capacity and payload mass, over a set of values to determine which combinations meet the flight range requirements.
For more information about this example, follow these steps to explore the overview that opens in your web browser or see Electric Aircraft Model in Simscape (MATLAB Central File Exchange).
Download Files
Clone the up-to-date repository in the current folder using the gitclone function.
gitclone("https://github.com/mathworks/Simscape-Air-Taxi");Alternatively, choose one of these options. You can download the latest files and versions of the project that are compatible with earlier releases of MATLAB using these options.
Download ZIP files of this project from Electric Aircraft Model in Simscape (MATLAB Central File Exchange).
Clone the Git™ repository from Electric Aircraft Model in Simscape (GitHub).
Open Project
After you use the gitclone function, MATLAB creates a new folder in the current folder. This example uses projects to manage the supporting files. Open the Airtaxi_Wing project file. If you have any projects open, MATLAB closes them before loading this project. An overview opens in your web browser that helps you explore the electric aircraft and hybrid electric aircraft models and modify many aspects of the design. The overview also shows you the main simulation results.
openProject("Simscape-Air-Taxi");Explore Project
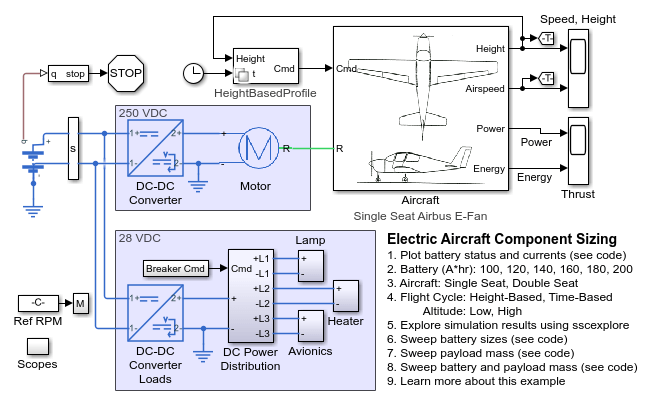
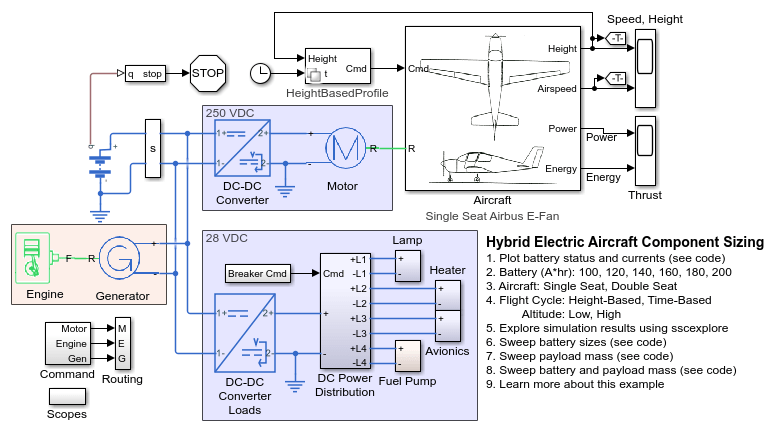
Electric Aircraft Power Network System
The top-level model shows the design of the electric aircraft model. The model includes a battery, two DC networks, and a mechanical model of the aircraft which acts as a load on the high-voltage DC network. The low-voltage DC network includes a set of loads that turn on and off during the flight cycle.
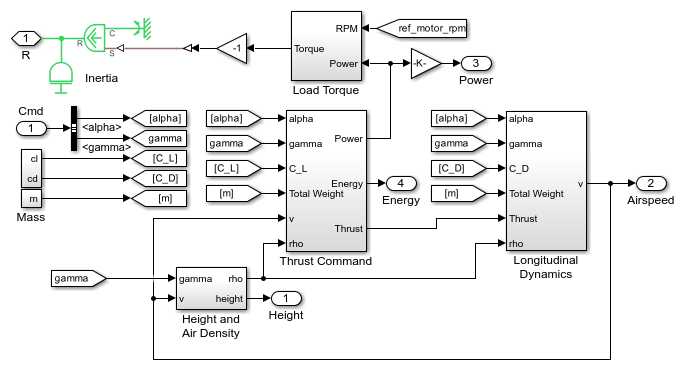
Aircraft System
Look under the mask of the Aircraft subsystem. Alternatively, at the MATLAB Command Window, run:
open_system('ssc_aircraft_elec/Aircraft','force')
The Aircraft subsystem models the aircraft as a load on the motor. This abstract model assumes that the pilot takes the actions necessary to follow the desired flight cycle, set by the angle of attack and the flight path angle with respect to the earth reference frame. The model calculates the required thrust to maintain the lift to follow the flight cycle. The model also calculates the mechanical power, and the load torque on the motor shaft that you need to deliver this thrust.
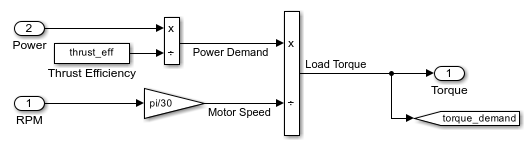
Load Torque System
Inside the Aircraft subsystem, look under the mask of the Load Torque subsystem. Alternatively, at the MATLAB Command Window, run:
open_system('ssc_aircraft_elec/Aircraft/Load Torque','force')
The Load Torque subsystem converts the required mechanical power into the load torque on the motor shaft. This abstract model converts a specified amount of the motor mechanical power into thrust. You can calculate the load torque on the motor shaft by dividing the power you need maintain thrust by the motor speed. The motor control system maintains the required shaft speed under the varying load.
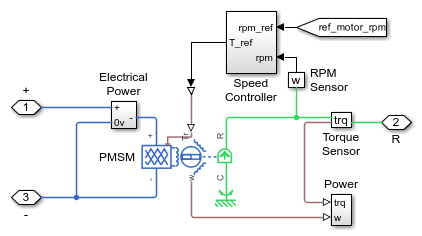
Motor System
In the top-level model, look under the mask of the Motor subsystem. Alternatively, at the MATLAB Command Window, run:
open_system('ssc_aircraft_elec/Motor','force')
The Motor subsystem represents an electric motor and drive electronics that operate in torque-control mode, or equivalently current-control mode. The torque-speed envelope defines the motor permissible range of torque and speed.
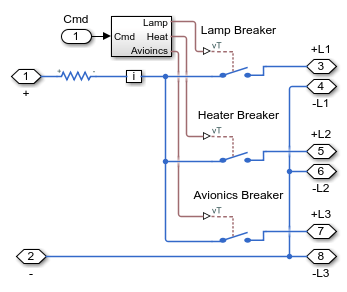
DC Power Distribution System
In the top-level model, look under the mask of the DC Power Distribution subsystem. Alternatively, at the MATLAB Command Window, run:
open_system('ssc_aircraft_elec/DC Power Distribution','force')
The DC Power Distribution subsystem models the breakers that open and close to connect and disconnect the loads from the low-voltage DC network. The varying conditions affect the power drawn from the network, the range of the aircraft, and the power requirements for the power lines in the aircraft.
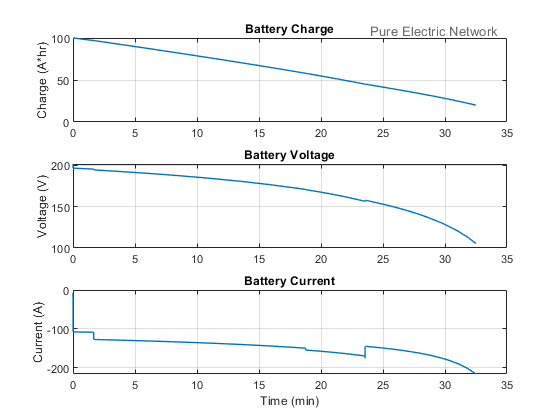
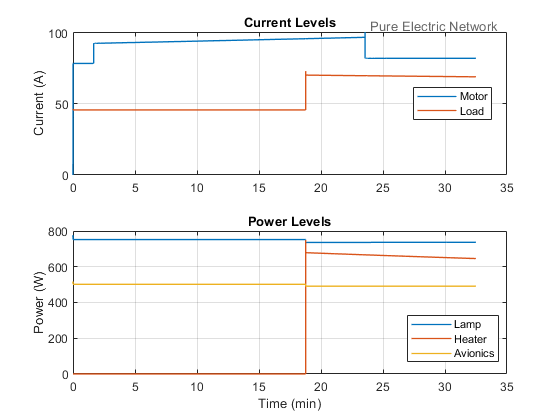
Simulation Results
These plots show the results of a single simulation. The aircraft starts from a low altitude, climbs to a higher altitude, and keeps level flight. The first plot shows the states of the battery of a pure electrical aircraft during a flight cycle. The second plot shows the current and power levels during simulation.
To generate these plots, at the MATLAB Command Window, run:
ssc_aircraft_elec_plot1time
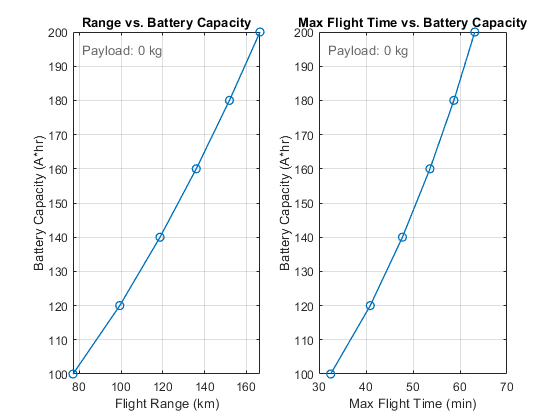
Simulation Results After Parameter Sweep of Battery Capacities
These plots show the effect of varying the battery capacity on the flight range and maximum flight time of the aircraft. The relationship between the battery size and the range is not linear because increasing the battery capacity also increases the overall weight of the aircraft.
To generate these plots, at the MATLAB Command Window, run:
payload_mass = 0; ssc_aircraft_sweep_battery;
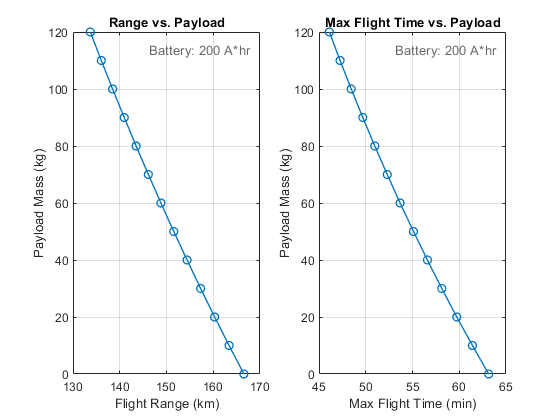
Simulation Results After Parameter Sweep of Payload Mass
These plots show the effect of the payload mass on the flight range and maximum flight time of the aircraft. Varying the payload mass represents adding additional luggage or an additional passenger.
To generate these plots, at the MATLAB Command Window, run:
battery_capacity = 200; ssc_aircraft_sweep_payload;
Comparison with Hybrid-Electric Architecture
The ssc_aircraft_elec_hybrid model contains a hybrid-electric architecture. Test these models to compare both the architectures against design requirements.
To open the hybrid-electric aircraft model, at the MATLAB Command Window, run:
open_system('ssc_aircraft_elec_hybrid')
To simulate and compare both aircraft models, at the MATLAB Command Window, run:
payload_mass = 0; ssc_aircraft_sweep_battery_compare close(h3_ssc_aircraft_elec) close(h3_ssc_aircraft_elec_hybrid) battery_capacity = 200; ssc_aircraft_sweep_payload_compare close(h4_ssc_aircraft_elec) close(h4_ssc_aircraft_elec_hybrid) ssc_aircraft_sweep_payloadbattery_compare close(h8_ssc_aircraft_elec) close(h8_ssc_aircraft_elec_hybrid)

To find the latest examples from the MathWorks Simscape Team, see MathWorks Simscape Team on MATLAB Central.
Related Topics
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)