三相システムとマシン
この節では以下を行います。
電動機を備えた三相電力システムや他の三相モデルをシミュレートする方法を学びます。
電力システムをシミュレートし、その動特性を観察します。これを行うには、Simscape™ Electrical™ Specialized Power Systems シミュレーション タイプ (連続と離散) である Continuous と Phasor の結果を比較します。
[Simscape] 、 [Electrical] 、 [Specialized Power Systems] 、 [Electrical Machines] ライブラリの 3 種類の電動機 (単純化された同期機、詳細な同期機、非同期機) を使用できます。それは、簡単な同期電動機と、複雑な同期電動機、そして非同期電動機の 3 種です。ディーゼル発電機を使った無停電電源の過渡安定性を調べるために、これらのマシンを、変圧器、負荷、ブレーカーなどの線形素子や非線形素子に相互接続します。
電動機と三相回路網
次の単線結線図で示されている 2 つの電動機をもつシステムは、配電網のディーゼル発電機と非同期モーターを表します。
ディーゼル発電機と非同期モーターをもつ配電網
このシステムは、1 MW の抵抗負荷とモーター負荷 (ASM) でシミュレートされるプラント (母線 B2) からなり、6 MVA、25/2.4 kV の変圧器を経た 25 kV 配電システム、および緊急用同期発電機/ディーゼル エンジン ユニット (SM) から 2400 V で電力供給されます。
25 kV のシステムは、簡単な R-L の等価電源と 5 MW の負荷でモデル化します。この電源は短絡電流 1000 MVA、品質係数 X/R = 10 とします。非同期モーターの定格値は 2250HP、2.4kV、同期発電機の定格値は 3.125MVA、2.4kV とします。
このシステムは power_machines の例でモデル化されています。
SM のパラメーターと、ディーゼル エンジンおよび調速機のモデルは、参考文献[1]に基づいています。
初期状態では、モーターは 2000HP の機械動力を発生し、一方、ディーゼル発電機は何の有効電力も発生しない待機状態にあります。そのため、同期電動機は、2400V の母線の B2 の電源において 1.0pu で調整するのに必要な無効電力だけを発生する同期コンデンサとして働きます。t = 0.1 秒で 25 kV システムに三相地絡故障が発生し、t = 0.2 秒に 25 kV 回路ブレーカーが開き、発電機の負荷が突然増加する原因となります。障害に続いてモーター発電機システムが孤立する過渡期の間、同期電動機の励起システムとディーゼル エンジンの調速機は電圧と速度を一定に維持するように反応します。
このシステムを初めてシミュレートする場合、通常、SM および ASM が定常状態で起動するための初期条件はわかっていません。
これらの初期条件は以下のとおりです。
SM ブロック: 速度偏差 (通常は 0%)、回転子の角度、固定子巻線を流れる電流の大きさと位相の各初期値、および指定された電力潮流のもとで意図した端子電圧を得るために必要な初期界磁電圧。
ASM ブロック: 滑り、回転子の角度、固定子巻線を流れる電流の大きさと位相の各初期値。
Synchronous Machine ブロックと Asynchronous Machine ブロックを開きます。1 pu に設定される SM の初期界磁電圧と ASM の滑りを除き、初期条件はすべて 0 に設定されます。SM および ASM の信号、および母線 B2 の電圧をモニターする 3 つのスコープを開きます。シミュレーションを開始し、障害を起こす前の最初の 100ms の信号を観測してください。
シミュレーションを開始すると、3 つの ASM の電流はゼロから始まり、含まれる DC 成分がゆっくり減衰することがわかります。モーターの負荷、あるいはディーゼル発電機の慣性のために、電動機の速度が安定するまでには相当長い時間がかかります。この例では、適用された負荷トルクよりモーターの始動トルクが小さいため、ASM は間違った向きに回転を始めます。シミュレーションを停止します。
正弦波電流と一定速度の定常状態におけるシミュレーションを開始する前に、電動機のすべての状態値が正しく初期化されていなければなりません。この初期化を手作業で行うことは、仮に簡単なシステムでも困難な作業です。powergui ブロック ダイアログの [ツール] タブで、[Load Flow Analyzer] ボタンをクリックします。Load Flow Analyzer アプリを使用して電動機を初期化します。
参考文献
[1] Yeager K.E. and Willis J.R. "Modeling of Emergency Diesel Generators in an 800 Megawatt Nuclear Power Plant." IEEE Transactions on Energy Conversion. Vol.8, No.3, September 1993.
フェーザ法を使った安定性解析
さらに多くのライン、負荷、変圧器、電動機を加えて回路網の複雑度が増すと、必要なシミュレーション時間は長くなります。その上、ゆっくりとした電気機械振動モード (大規模システムでは通常 0.02Hz ~ 2Hz) を調べる場合には、数十秒間のシミュレートが必要となる可能性があり、シミュレーション時間は長くなります。したがって、このような低周波数の振動モードを含む安定性解析を行うには、これまで説明してきた連続シミュレーションや離散シミュレーションは実用的ではありません。こうした解析を行うには、フェーザ法を使用します (フェーザ シミュレーション法の導入を参照)。
安定性解析においては、R、L、C の線形素子と分布定数線路の相互作用で発生する高速振動モードは無視されます。それらの振動モードは、通常、基本周波数 50Hz や 60Hz より高い周波数のところにあります。これらは、決してレギュレーターの時定数や低周波電動機モードに障害を与えるものではありません。フェーザ法では、回路網の微分方程式を代数方程式に置き換えることにより、これらの高速モードは無視されます。したがって、回路網の状態空間モデルは、基本周波数における伝達関数と入出力の関係で置き換えられます。ここで入力は電動機から回路網によって印加される電流で、出力は電動機の端子で発生する電圧です。フェーザ法は、低周波数状態の電動機、タービン、そしてレギュレーターで構成され、状態数が削減された状態空間モデルを使用します。このため、シミュレーション時間は極めて短い時間で済みます。フェーザ モデルには、連続と離散の 2 つのソルバー タイプがあります。ソルバーのタイプを指定するには、powergui ブロックで、[Simulation type] を [Phasor] (連続) または [Discrete phasor] に設定します。連続フェーザ法では、Simulink® の可変ステップ ソルバーを使用します。連続の可変ステップ ソルバーは、このタイプの問題を解く際に有効です。このような状況で使用できる連続の可変ステップ ソルバーの例として、基本周波数の 1 サイクル (1/60 秒または 1/50 秒) を最大タイム ステップとする ode23tb があります。[Discrete phasor] はローカル ソルバーを使用して、指定したサンプル時間でフェーザ モデルの離散化と解決を行います。[Discrete phasor] シミュレーション法では、Simulink Coder™ を使用してコードを生成し、モデルをリアルタイムでシミュレートできます。
power_machines の例において従来の方法でシミュレートした 2 つの電動機をもつシステムに、フェーザ法を適用します。power_machines の例を開きます。
powergui ブロックで、[Simulation type] を [Phasor] に設定します。回路網の代数方程式を解くために使用する基本周波数を指定します。[Frequency] フィールドに「60」と入力します。powergui アイコンに Phasor 60 Hz の語句が表示され、回路のシミュレーションにこの新しい方法が使用されることを示しています。定常状態でシミュレーションを開始するには、まず電動機の初期化手順を繰り返さなければなりません。
シミュレーションは非常に高速になったことを確認してください。結果は、連続モードのシミュレーションで得たものとほぼ同等です。
離散フェーザ シミュレーションを試すこともできます。powergui ブロックで、[Simulation type] を [Discrete phasor] に設定し、4e-3 秒のサンプル時間を指定します。
以下の図では、3 つのシミュレーション タイプについて同期機の波形が比較されています。
連続 (黄)
フェーザ (連続) (シアン)
サンプル時間が 4 ms の離散フェーザ (マゼンタ)
連続シミュレーション法とフェーザ シミュレーション法の結果の比較
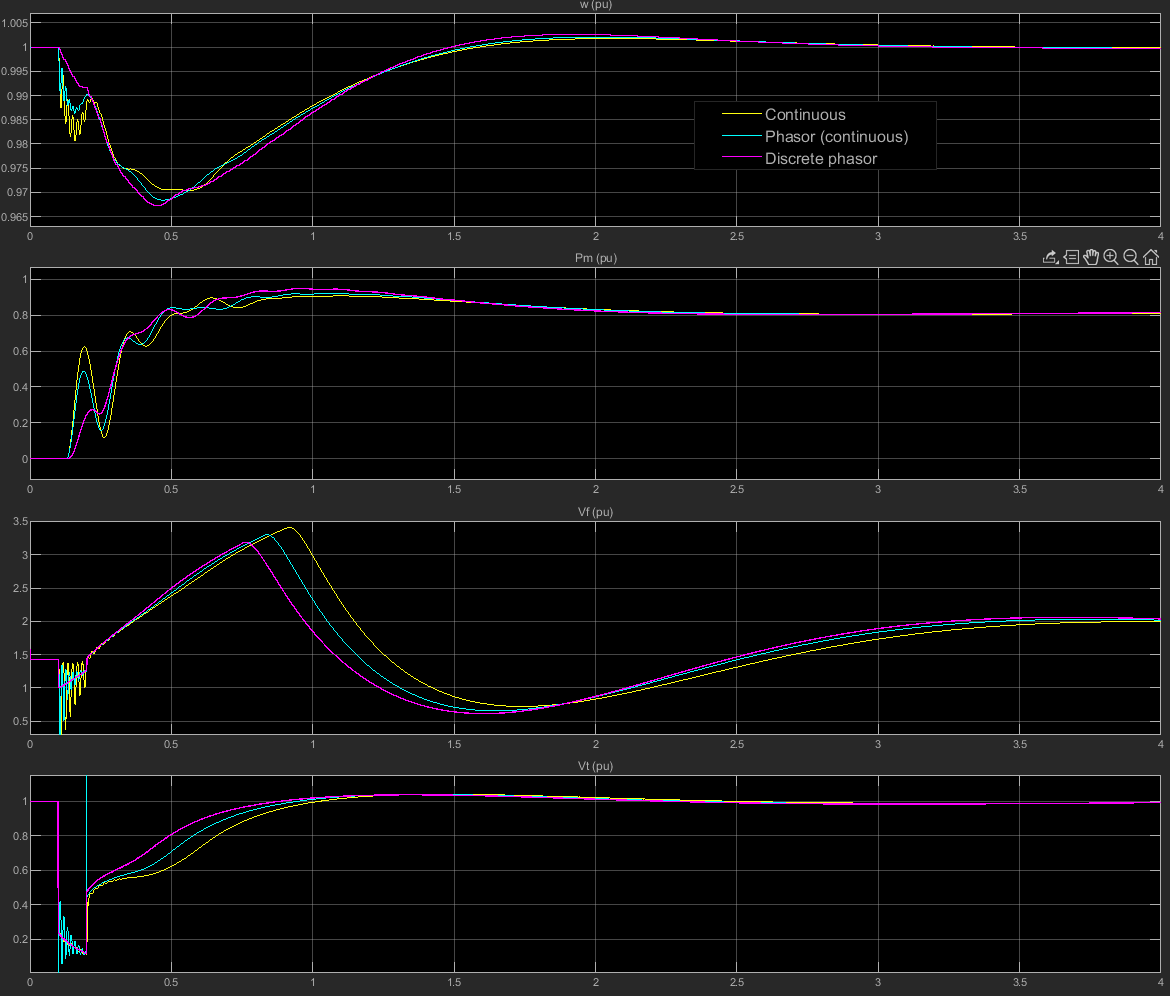
どちらのフェーザ モデル (連続および離散) も、連続モデルとよく一致しています。
電動機微分方程式の完全なセットを使用して固定子と回転子の過渡状態をモデル化する連続フェーザ ソルバーとは異なり、離散フェーザ ソルバーは、固定子側の微分方程式を代数方程式に置き換えた、簡略化された電動機モデルを使用します。これら低次の電動機モデルにより、2 つの状態 (phid と phiq の固定子磁束) が排除され、市販の安定性ソフトウェアに類似したシミュレーション結果が生成されます。連続フェーザ ソルバーと比較すると、離散フェーザ ソルバーはより明確な波形を生成します。この例で観察できるのは、離散フェーザ モデルでは、速度 (w) と端子電圧 (Vt) の高周波数の振動が排除され、ブレーカーが開いたときに観察される Vt 電圧の急上昇も排除されることです。
離散フェーザ ソルバーには、他にも次の 2 つの利点があります。
このソルバーはロバストな解法を使用するため、電動機の寄生負荷を排除できる。
このソルバーでは、Simulink Coder を使用してコードを生成し、モデルをリアルタイムでシミュレートできる。
メモ
[Simulation type] を [Discrete phasor] に設定しても、2 つの制御ブロック (Diesel Engine and Governor と Excitation) は連続のままであり、引き続き ode23tb の可変ステップ ソルバーを使用します。このモデルをリアルタイムでシミュレートする場合は、モデル全体で固定時間ステップを使用しなければなりません。そのため、可変ステップ ソルバーを、電気回路網と同じサンプル時間を使用する固定ステップ ソルバーに変更する必要があります。
以下の例では、さらに複雑な回路網に関するフェーザ法が示されています。
電力系統安定化装置 (PSS) と静止型無効電力補償装置 (SVC) を有する 2 つの電動機の過渡的安定性 (
power_svc_pssモデル)地域間動揺に対する 3 つの電力系統安定化装置 (PSS) の動作 (
power_PSSモデル)
最初の例は、電力系統安定化装置 (PSS) の影響、静止型無効電力補償装置 (SVC) の使用により、2 つの電動機を有する電力システムが、著しく安定することを示しています。2 つ目の例では、4 つの電動機、2 つの地域のシステムにおける 3 種類の電力系統安定化装置の動作を比較します。
フェーザ法は、FACTS モデルでも使用されます。SVC と PSS による過渡安定性の向上とUPFC および PST を使用した電力潮流の制御を参照してください。
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)