looptune で調整する制御システムの構造
looptune では、既定の要件または指定した要件に合わせて以下に示されているフィードバック ループを調整します。

C はコントローラーを表し、G はプラントを表します。センサー出力 y ("測定信号") およびアクチュエータ出力 u ("制御信号") は、プラントとコントローラー間の境界を定義します。コントローラーは、制御システムの中で入力が測定値で出力が制御信号になる部分にあたります。反対に、プラントは残りの部分です。つまり、制御システムにおいて制御信号を入力として受け取り、測定値を出力として生成する部分です。
たとえば、次の図の制御システムでは、コントローラー C は測定値 y と基準信号 r を受け取ります。コントローラーは qL と qV を出力として生成します。
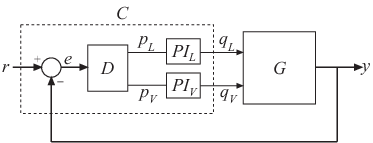
コントローラー C には固定内部構造があります。C には、ゲイン行列 D、PI コントローラー PI_L と PI_V、および加算結合が含まれます。looptune コマンドは、D のゲインや PI_L および PI_V の比例ゲインと積分ゲインなど、C の自由パラメーターを調整します。looptune を使用して C と G の両方でフリー パラメーターを一緒に調整することもできます。