FMU ブロックの実装
ブロックを実装し、Functional Mockup Unit (FMU) をブロックに割り当てます。その後、ブロックを調べて FMU を確認できます。この例では、車両の FMU を備えた FMU ブロックを使用します。
モデルを作成し、FMU ブロックを追加します。
FMU のソース コードに現在のプラットフォーム用のバイナリがない場合は、関数
fmudialog.compileFMUSourcesを使用して現在のプラットフォーム用のバイナリを生成できます。ブロックのダイアログ ボックスの [FMU 名] パラメーターに FMU ファイルのパス名を入力し、[OK] または [適用] をクリックします。ファイルの拡張子
.fmuはオプションです。[OK] または [適用] の初回クリック時に、FMU に設定する FMU モード (コシミュレーションまたはモデル交換) がブロックによって特定されます。
また、ブロックによって
slprj/_fmu/fmu_nameフォルダーが作成され、FMU ファイルの内容がこのフォルダーにアンパックされます。このフォルダーには必要に応じて次を含めることができます。binaries— FMU のバイナリ ファイルdocumentation— FMU のドキュメンテーションの HTML ファイルresources— FMU のソース ファイルsources— FMU のソース ファイルブロック マスク ファイルや記述ファイルなど、その他のサポート ファイル
FMU ブロックのアイコンと端子ラベルは、対応する FMU のラベルに更新されます。ブロックを FMU に関連付けた後で FMU を変更する場合は、FMU ブロックを右クリックして [ブロック パラメーター] ボタン  をクリックし、[FMU 名] に新しい FMU 名を入力します。このトピックの節ではFMU Import ブロックによる構造化データのインターフェイスの簡略化の例からの FMU を使用します。
をクリックし、[FMU 名] に新しい FMU 名を入力します。このトピックの節ではFMU Import ブロックによる構造化データのインターフェイスの簡略化の例からの FMU を使用します。
FMU ブロックの確認
ブロックをダブルクリックします。現在のフォルダーから fmuVehicAOB.fmu という名前の FMU を入力したと仮定します。FMU ブロックのダイアログ ボックスには fmuVehicAOB.fmu ファイルで定義された FMU パラメーターが反映されます。
[パラメーター] タブ

FMU ブロック パラメーターのリストが表示されます。必要に応じて値を編集します。ツリー ビューを展開して構造体パラメーターの要素を編集できます。
[シミュレーション] タブ
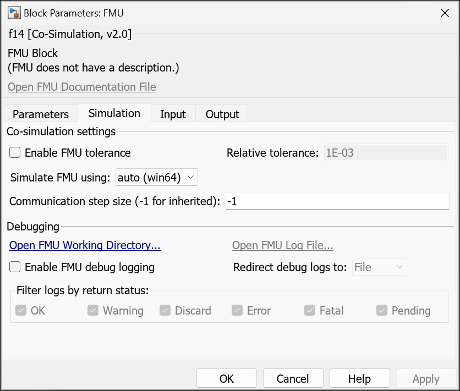
ログの記録および関連するカスタマイズを有効にします。
相対許容誤差を入力するには、[FMU 許容誤差の有効化] を選択し、それを設定します。
モデル内のブロックのサンプル時間を決定するには、[通信ステップ サイズ] を設定します。Simulink® ソルバーからステップ サイズを継承するには、
-1に設定します。このオプションは、FMU がコシミュレーション FMU である場合のみ利用できます。イベント モードでシミュレートする場合は、[イベント モードを有効にする] オプションをオンにします。このオプションは、FMU がコシミュレーション モードで使用されていて、FMI 3.0 標準との互換性がある場合にのみ使用可能です。
ログ記録を有効にするには、[FMU のデバッグ ログを有効にする] を選択します。
[デバッグ ログのリダイレクト先] でログのリダイレクト先を選択します。
[ファイル]。slprj\_fmu\_logs_に保存されます。modelname\modelname_blockname.txt[Display]。MATLAB® コマンド ウィンドウに表示されます。
[FMU のデバッグ ログを有効にする] チェック ボックスが選択されており、[デバッグ ログのリダイレクト先] パラメーターが
Displayに設定されている FMU ブロックは、コシミュレーションに利用できません。コシミュレーションと複数のコアの詳細については、複数のコアにおけるコシミュレーション コンポーネントの実行を参照してください。[戻りステータスでログをフィルター処理] で、希望する戻りステータスのチェック ボックスをオンにします。
Windows® 上に Linux® バイナリを含む FMU があり、その Linux バイナリをシミュレーションに使用する場合は、[次を使用した FMU のシミュレーション] パラメーターを [linux64] に設定します。この機能には Simulink FMU ビルダーが必要です。
[入力] タブと [出力] タブ


これらの 2 つのタブには、ブロックが定義する入力端子と出力端子のリストが表示されます。バス型または列挙型の端子については、[Type オブジェクト] フィールドにバス オブジェクトまたは列挙クラスが示されます。FMU ブロックは、バス型および列挙型の端子の信号属性を modelDescription.xml ファイル内のメタデータを使用して判別します。
列挙型の端子で下流および上流のブロックに信号データを継承できるようにするには、[入力] タブと [出力] タブの [Type オブジェクト] フィールドを [Inherit:Auto] に設定します。
バス型の端子で下流のブロックに信号データを継承できるようにするには、[出力] タブの [Type オブジェクト] フィールドを [Auto generate] に設定します。バス端子では逆方向の継承はサポートされません。バス型の入力端子をもつ FMU には、互換性があるバス型の入力信号を提供する必要があります。
FMU で使用されるバス オブジェクトをワークスペースで作成するには、関数 fmudialog.createBusType を使用します。
fmudialog.createBusType(gcb)
FMU で使用される列挙クラスをワークスペースで作成するには、fmudialog.createEnumType 関数を使用します。
fmudialog.createEnumType(gcb)
ブロックの入力、出力、パラメーター、および内部変数構造体の変更
FMU ブロックの入力端子、出力端子、およびパラメーターのレイアウトを以下のパラメーターを使用して変更できます。
| パラメーター | アクション | 設定 |
|---|---|---|
FMUInputMapping | 入力端子の階層を変更します。 |
|
FMUOutputMapping | 出力端子の階層を変更します。 |
|
FMUParamMapping | パラメーターの階層を変更します。 |
|
FMUInternalMapping | 内部変数の階層を変更します。 |
|
関数 get_param と set_param を使用して、これらの値を設定します。たとえば、以下のような構造体の構成を示す [ブロック パラメーター] タブがあると仮定します。

パラメーターは struct に含まれています。パラメーターを個別にリストするには、FMUParamMapping プロパティを 'Flat' に設定します。
set_param(gcb,'FMUParamMapping', 'Flat')

タイミングに関する考慮事項
[通信ステップ サイズ] パラメーターで FMU ブロックのサンプル時間を設定できます。このブロックのサンプル時間設定 tC は、すべての Simulink ブロックと同様に、モデルのサンプル時間 tM の整数倍でなければなりません。Simulink では、通信ステップ サイズ tC がモデル ステップ サイズ tM の倍数でない場合エラーが発生します。
一方、FMU tL のローカル ステップ サイズは FMU 指定の一部で、FMU でのみ内部で認識されます。適切に動作させるために、通信ステップ サイズ tC は tL の整数倍でもなければなりません。モデルのサンプル時間 tM またはブロックのサンプル時間 tC が FMU ローカル ステップ サイズ tL と互換しない場合、FMU では、実装に応じて実行時にエラーが発生する場合としない場合があります。
FMU ブロックでは、時間ベースのクロックを使用する FMU のインポートがサポートされます。時間ベースのクロックの FMU 変数を使用して FMU の実行レートを制御できます。Simulink で時間ベースのクロックを使用する FMU のシミュレーション例については、Import and Simulate FMU with Time-Based Clocks in Simulinkを参照してください。
FMU のトラブルシューティング
FMU の使用に関して問題が発生した場合は、以下のことを行ってください。
FMU Check ツールを使用して FMU を検証する。
FMU ブロックの [シミュレーション] タブで [FMU のデバッグ ログを有効にする] チェック ボックスをオンにする。
FMU のサプライヤに問い合わせる。