Translational Multibody Interface
機械並進ネットワークと Simscape Multibody ジョイントの間のインターフェイス

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Multibody Interfaces
説明
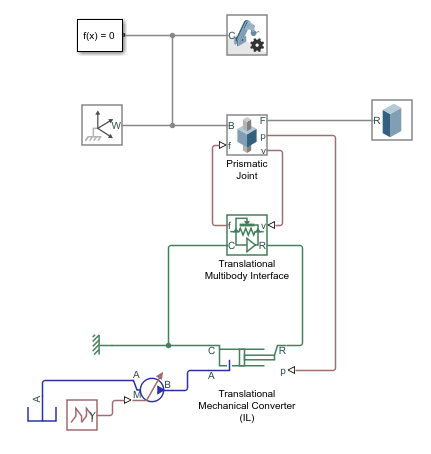
Translational Multibody Interface ブロックは、機械並進端子をもつ Simscape™ ブロックと直進プリミティブをもつ Simscape Multibody™ ジョイントを接続する直観的な方法を実装します。Translational Multibody Interface ブロックに接続できる Simscape ブロックには次が含まれます。
Foundation、Mechanical、Translational Elements ライブラリの Translational Friction や Translational Damper などのブロック。
その他の Foundation ライブラリの Translational Mechanical Converter (G) や Translational Mechanical Converter (IL) などの機械並進端子をもつブロック。
Simscape Fluids™ ライブラリの油圧アクチュエータなど、アドオン製品の機械並進端子をもつブロック。
Translational Multibody Interface ブロックは、インターフェイス全体の力と相対速度を一致させます。直進プリミティブをもつ任意の Simscape Multibody のジョイントに、これを接続できます。
ジョイントの速度検出端子 [v] と作動力端子 [f] を有効にします。ジョイントに複数の自由度がある場合は、選択した速度検出と作動力を必ず同じ自由度に対応させます。
Translational Multibody Interface ブロックの物理量信号端子 [v] および [f] を Simscape Multibody ジョイントの端子 [v] および [f] に接続します。
Translational Multibody Interface ブロックの端子 [C] および [R] を Simscape 機械並進ネットワークに接続します。

詳しい手順については、Simscape ネットワークと Simscape Multibody のジョイントとの接続を参照してください。
Translational Friction や Translational Damper などのブロックには位置情報が不要であり、これらのブロックには力と角速度に基づくインターフェイスで十分です。油圧アクチュエータのような他のブロックでは、それらの端子間の相対位置に関する情報が必要です。これらのブロックを Simscape Multibody のジョイントに接続するには、次を行います。
Translational Multibody Interface ブロックを使用します。ジョイントの速度検出端子 [v] と作動力端子 [f] を有効にし、それらの端子を上記のように接続します。
さらに、ジョイントの位置検出端子 [p] を有効にします。ジョイントに複数の自由度がある場合は、位置検出、速度検出、および作動力のすべてを必ず同じ自由度に対応させます。
アクチュエータ ブロックで、[インターフェイスの変位] パラメーターを
[Multibody のジョイントから入力信号を提供]に設定して、位置入力端子 [p] を有効にします。アクチュエータ ブロックの位置入力端子 [p] を Simscape Multibody ジョイントの位置検出端子 [p] に接続します。
仮定と制限
Translational Multibody Interface ブロックまたは Rotational Multibody Interface ブロックを含むモデルでは、Simscape Multibody ブロックを使用して質量と慣性をモデル化することを推奨します。この理由は、Simscape ネットワークには、そのネットワーク内のすべての質量と慣性の加速基準となる接地 (基準) ノードが必要なためです。Simscape Multibody のジョイントでは、base 座標系と follower 座標系の両方が加速していることがあります。このため、ジョイントに接続されている Simscape ネットワーク内の質量または慣性が、正しい慣性基準をもたない可能性があります。
例

並進インターフェイス:気体圧モデルを使用した星型エンジン
このモデルでは、5 気筒星型エンジンのシミュレーションを実行します。気筒内の圧力のダイナミクスは、Simscape™ Foundation Library の気体ドメインと機械並進ドメインを使用してモデル化されます。3D 機械コンポーネントは、Simscape Multibody™ を使用してモデル化されます。モデルの 1D Simscape パーツと 3D Multibody パーツ間のインターフェイスがどのようにとられているかを確認するには、"Force Model" というブロックのいずれかの内部を確認してください。圧力モデルは、クランク角度に基づいて圧力を適用する、理想化された圧力源です。このモデルは、より現実的な気筒チャンバーの圧力モデルと置き換えることができます。気筒は A、C、E、B、D の順に点火し、クランク回転 144 度ごとに動力工程が発生します。
端子
入力
出力
保存
バージョン履歴
R2021a で導入