Battery Capacity Estimator (Kalman Filter)

Libraries:
Simscape /
Battery /
BMS /
Estimators
Description
The Battery Capacity Estimator (Kalman Filter) block implements an estimator that calculates the cell capacity of a battery by using the Kalman filter algorithms.
Use this block in conjunction with another block that estimates the state of charge (SOC) of the battery, such as SOC Estimator (Kalman Filter) or SOC Estimator (Adaptive Kalman Filter).
This block supports single-precision and double-precision floating-point simulation.
Note
To enable inherited single-precision floating-point simulation, the data type of all
inputs and parameters, except for the Sample time (-1 for
inherited) parameter, must be single.
For continuous-time simulation, set the Filter type parameter to
Extended Kalman-Bucy filter or Unscented
Kalman-Bucy filter.
Note
Continuous-time implementation of this block works only in a double-precision floating-point simulation. If you provide single-precision floating-point parameters and inputs, this block casts them to double-precision floating-point values to prevent errors.
For discrete-time simulation, set the Filter type parameter to
Extended Kalman filter or Unscented Kalman
filter and the Sample time (-1 for inherited)
parameter to a positive value or -1.
Equations
To estimate the battery capacity, the Battery Capacity Estimator (Kalman Filter) block starts from the equations of the derivative of the capacity and the SOC:
where
SOC is the state of charge.
i is the current of the battery cell.
Q is the capacity in Ampere-hour.
The first equation is the state equation. The second equation is the output equation.
For the Kalman filter algorithms, the Battery Capacity Estimator (Kalman Filter) block uses Q as the state and these process and observation functions:
This diagram shows the structure of the extended Kalman filter (EKF):

The EKF technique relies on a linearization at every time step to approximate the nonlinear system. To linearize the system at every time step, the algorithm computes these Jacobians online:
The EKF is a discrete-time algorithm. After the discretization, the Jacobians for the SOC estimation of the battery are:
where TS is the sample time.
For more information about the implementation of the EKF algorithm steps, see the Extended Kalman Filter section of the SOC Estimator (Kalman Filter) block.
This diagram shows the structure of the extended Kalman-Bucy filter (EKBF):

The EKBF is the continuous-time variant of the Kalman filter. In continuous time, the prediction and correction steps are coupled.
For more information about the implementation of the EKF algorithm steps, see the Extended Kalman-Bucy Filter section of the SOC Estimator (Kalman Filter) block.
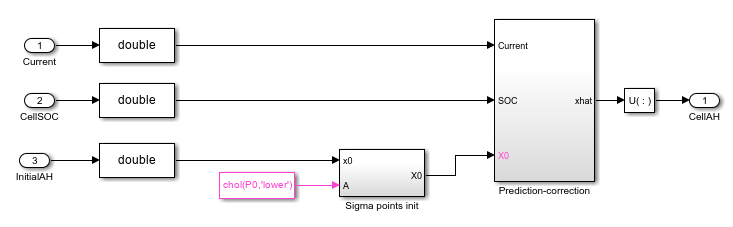
This diagram shows the structure of the unscented Kalman filter (UKF):

The EKF locally approximates nonlinear functions with the linear equations obtained from the Taylor expansion by using only the first term of the expansion. In a highly nonlinear system, these solutions are not very accurate.
The UKF uses nonlinear transformations on a set of sigma points that the algorithm chooses deterministically. This technique is called unscented transformation. The mean and the covariance matrix of the transformed points are accurate to the second order of the Taylor series expansion.
For more information about the implementation of the EKF algorithm steps, see the Unscented Kalman Filter section of the SOC Estimator (Kalman Filter) block.
This diagram illustrates the structure of the unscented Kalman-Bucy filter (UKBF):
The derived continuous-time filtering equations of the UKBF are similar to the EKBF equations.
For more information about the implementation of the EKF algorithm steps, see the Unscented Kalman-Bucy Filter section of the SOC Estimator (Kalman Filter) block.
Examples

Estimate Battery State of Health Based on Capacity Fade
Estimate the battery capacity and state of health (SOH) by using a Kalman filter. The initial state of charge (SOC) of the battery is equal to 0.5. The estimator uses an initial condition for the SOC equal to 0.8. The battery keeps charging and discharging for 50 hours. The example estimates the battery capacity, in ampere-hour, and the SOC by using an extended Kalman Filter. The estimation error for the battery capacity is less than 4%. The SOC is estimated using an extended Kalman filter. When using fixed capacity the estimated SOC value diverges from the true value. To demonstrate the functionality of the estimator and to restrict the duration of the simulation, this example models an increased capacity fade rate.
Ports
Input
Output
Parameters
Option to specify the value of the Current input port as a vector of cell currents. If you select this parameter, the value at the Current input port can be a scalar or a vector of size equal to the size of the block inputs.
Type of Kalman filter that this block uses to estimate the battery cell capacity.
Coefficient that controls the spread of the sigma points. The block uses this parameter in its implementation of the equations for the unscented Kalman filter and the unscented Kalman-Bucy filter.
Dependencies
To enable this parameter, set Filter type to
Unscented Kalman filter or
Unscented Kalman-Bucy filter.
Coefficient related to the distribution. The block uses this parameter in its implementation of the unscented Kalman filter and the unscented Kalman-Bucy filter.
Dependencies
To enable this parameter, set Filter type to
Unscented Kalman filter or
Unscented Kalman-Bucy filter.
Coefficient that controls the spread of the sigma points. The block uses this parameter in its implementation of the equations for the unscented Kalman filter and the unscented Kalman-Bucy filter.
Dependencies
To enable this parameter, set Filter type to
Unscented Kalman filter or
Unscented Kalman-Bucy filter.
Covariance of the noise in the state.
Covariance of the noise in the measurements.
Covariance of the initial state error. This parameter defines the deviation in the initialization of the state.
Time between consecutive block executions. During execution, the block produces outputs and, if appropriate, updates its internal state. For more information, see What Is Sample Time? and Specify Sample Time.
For inherited discrete-time operation, specify this parameter as -1.
For discrete-time operation, specify this parameter as a positive real
number. For continuous-time operation, specify this parameter as
0.
If this block is in a masked subsystem or a variant subsystem that supports switching between continuous operation and discrete operation, promote the sample time parameter. Promoting the sample time parameter ensures correct switching between the continuous and discrete implementations of the block. For more information, see Promote Block Parameters to a Mask.
Dependencies
To enable this parameter, set Filter type to
Extended Kalman filter or
Unscented Kalman filter.
Since R2025a
Option to choose the data type for the block algorithm, specified as one of these values:
Inherit: auto— You can simulate the block in bothsingleanddoubleprecision. You must explicitly provide the inputs and parameters as eithersingleordouble.double— The block algorithm casts all inputs and parameters todoubledata type.single— The block algorithm casts all inputs and parameters tosingledata type.<data type expression>— The block algorithm casts all inputs and parameters to the data type object you specify.
Click the Show data type assistant button ![]() to display the Data Type Assistant, which helps you set the data type attributes. For more information, see Specify Data Types Using Data Type Assistant and Control Data Types of Signals.
to display the Data Type Assistant, which helps you set the data type attributes. For more information, see Specify Data Types Using Data Type Assistant and Control Data Types of Signals.