モデルと生成されたコードのシミュレーション結果における数値の整合性
数値の整合性
モデルベース デザインのワークフローで、MathWorks® 製品を使用して固定小数点および浮動小数点演算を使用する数値アプリケーション用のコードを生成します。
モデルを生成するには、MATLAB®、Simulink® および Stateflow® を使用します。
ソース コードを生成するには、Simulink Coder™ と Embedded Coder® を使用します。
モデルと生成されたコード間の数値的等価性をテストするには、モデルと生成されたコードのシミュレーション結果を比較します。たとえば、ノーマル モードのシミュレーション結果をソフトウェアインザループ (SIL) シミュレーション結果と比較します。
モデルと生成されたコードのシミュレーションの結果は、以下の場合、数値的に整合しています。
固定小数点アプリケーションでは、結果は、ビット単位の比較で一致します。
浮動小数点アプリケーションでは、結果は、指定した許容誤差と一致します。
シミュレーション データ インスペクターを使用して結果を比較します。不一致が存在するかどうかや、不一致が大きいかどうかを判別するために、絶対許容誤差の値と相対許容誤差の値を指定できます。
固定小数点アプリケーションの場合、ゼロの絶対許容誤差を指定できます。
浮動小数点アプリケーションの場合、参照値または信号に関する許容誤差を指定できます。参照の選択はアプリケーションに依存します。以下の例について考えます。
反復するフィードフォワード エラー計算で線形の代数方程式を解くアルゴリズム。
epsに対する許容誤差を指定できます。閉ループ システムの比例-積分-微分 (PID) コントローラー。過渡動作の場合、標準から条件を使用して許容誤差を指定できます。定常状態動作の場合、PID コントローラーの特性を基準にして許容誤差を指定できます。
Simulink.sdi.Signal オブジェクトの absTol および relTol プロパティを使用して、プログラムにより絶対許容誤差の値と相対許容誤差の値を指定できます。
複雑なシステムにおける数値の整合性
複雑なシステムの場合、モデルと生成されたコードのシミュレーションにおける数値の差は、システムを介して伝播するブロックレベルの差が原因として考えられます。システム レベルで数値の差を観察する場合、次を行います。
ブロックレベルの数値の差が許容誤差を超えるブロックを特定します。
特定された各ブロックを調査します。
以下のプラントコントローラー モデルを検討します。
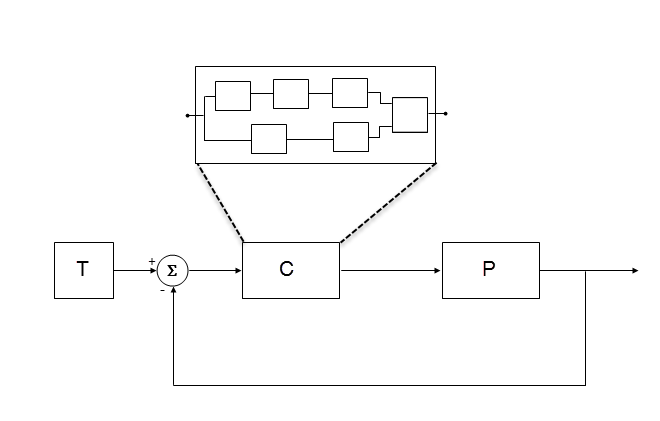
T は、基準信号またはテスト信号を生成します。
C はコントローラー コンポーネントです。コントローラー出力はプラント入力です。C は複数の Model ブロックを構成する Model ブロックである可能性があります。
P はプラント コンポーネントです。プラント出力は基準信号から減算され、コントローラー入力を生成します。
モデル コントローラーと生成されたコード バージョンの間の数値的等価性をテストするには、次を行います。
ノーマル モードでモデルを実行し、シミュレーション データ インスペクターを使用して C の出力を記録します。
C の SIL モードを指定します。シミュレーションを再実行し、C の出力を記録します。
シミュレーション データ インスペクターを使用し、指定した許容誤差を基準にしてノーマル モードの出力と SIL モードの出力を比較します。
シミュレーション データ インスペクターの比較により一致が示される場合、モデルと生成されたコードの結果は数値的に整合しています。
ノーマル モードの出力と SIL モードの出力が一致しない場合、次を行います。
C 内で、ブロック出力に対する信号のログを有効にします。
ノーマル モードでモデルを実行します。
SIL モードで C を使用し、シミュレーションを再実行します。
シミュレーション データ インスペクターを使用し、指定した許容誤差を基準に記録された出力信号を比較します。シミュレーション データの比較を参照してください。
ノーマル モードの出力と SIL モードの出力の差が許容誤差を超えるブロックを特定します。
特定された各ブロックを解析し、原因を検索します。たとえば、生成されたコードは MATLAB とは異なる数学ライブラリを使用する場合があります。
メモ
大量の信号を比較しなければならない場合は、Simulink Test™ でワークフローを自動化できます。を参照してください。
ブロックレベルの数値的な差の理由
固定小数点および浮動小数点アプリケーション開発では、モデルと生成されたコードのシミュレーションから得られるブロックレベルの結果間の数値的な一致に影響する可能性のある要因があります。
一部の要因は固定小数点および浮動小数点アプリケーションの両方に影響します。たとえば、以下の使用などです。
コード生成の最適化。
カスタム コード。
結果が MATLAB の結果と異なるコード置換ライブラリのエントリ。
さまざまなアルゴリズムを実装するコード置換ライブラリ。
浮動小数点アプリケーションのみに影響する要因もあります。以下に例を示します。
アルゴリズムの数値的正常性。
入力に対するアルゴリズムの感度。
閉ループと開ループの動作。
参照
[1] IEEE® Standard on Transitions, Pulses, and Related Waveforms, IEEE Standard 181, 2003, pp. 15–17.
参考
トピック
- シミュレーション結果の解析
- 生成されたコードと MATLAB コードの相違点
- V モデルのインザループ テストのタイプ (Embedded Coder)
- MATLAB Function
- SIL and PIL Limitations (Embedded Coder)