Simulink における二輪ロボットのパスの計画
この例では、与えられたマップ上の 2 点の位置間で障害物のないパスを Simulink® で実行する方法を説明します。パスは確率的ロード マップ (PRM) の計画アルゴリズム (mobileRobotPRM)) を使用して生成されます。このパスを通るための制御コマンドは、Pure Pursuit コントローラー ブロックを使用して生成されます。二輪の運動学的運動モデルは、これらのコマンドに基づいてロボットの運動をシミュレートします。
マップと Simulink モデルの読み込み
MATLAB ワークスペースにマップを読み込みます。
load exampleMaps.mat開始位置とゴール位置を入力します。
startLoc = [5 5]; goalLoc = [12 3];
インポートされるマップは、simpleMap、complexMap および ternaryMap です。
Simulink モデルを開きます。
open_system('pathPlanningBicycleSimulinkModel.slx')モデルの概要
モデルは 4 つの主要な処理で構成されます。
計画
制御
プラント モデル
計画
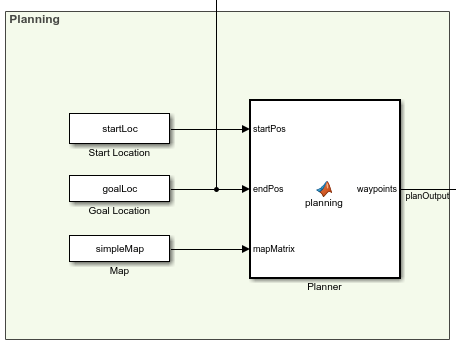
MATLAB® Function ブロック Planner は mobileRobotPRM パス プランナーを使用し、入力として開始位置、ゴール位置およびマップを受け入れます。ブロックはロボットが追従するウェイポイントの配列を出力します。計画されたウェイポイントは、下流の Pure Pursuit コントローラー ブロックによって使用されます。
制御
Pure Pursuit
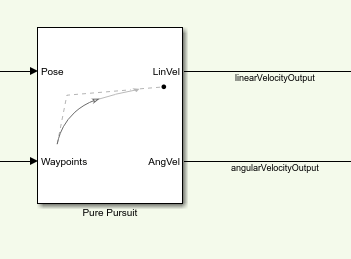
Pure Pursuit コントローラー ブロックは、ウェイポイントと現在のロボットの姿勢に基づいて線形速度と角速度のコマンドを生成します。
ゴール到達のチェック
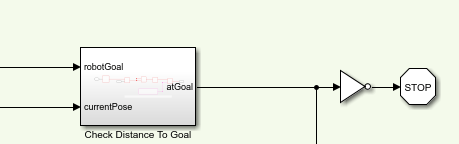
Check Distance to Goal サブシステムによってゴールまでの現在の距離が計算され、その距離がしきい値内にある場合はシミュレーションが停止します。
プラント モデル
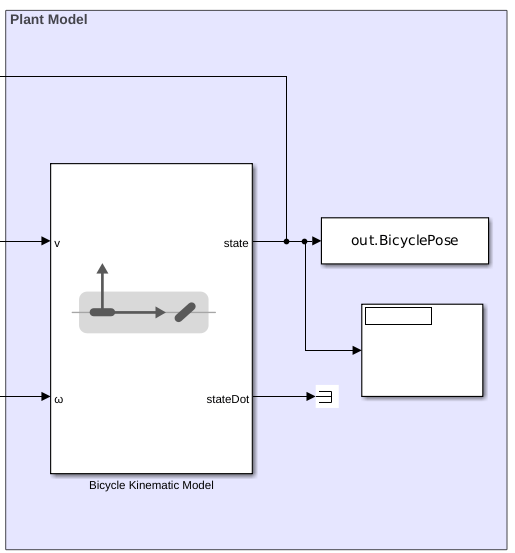
"Bicycle Kinematic Model" ブロックは、簡略化されたビークル運動をシミュレートするビークル モデルを作成します。このブロックはコマンド入力として Pure Pursuit コントローラー ブロックから線形速度と角速度を受け取り、現在の位置と速度の状態を出力します。
モデルの実行
モデルをシミュレートするには、次を行います。
simulation = sim('pathPlanningBicycleSimulinkModel.slx');ロボットの運動の可視化
姿勢を確認するには、以下を行います。
map = binaryOccupancyMap(simpleMap)
map =
binaryOccupancyMap with properties:
LayerName: 'binaryLayer'
DataType: 'logical'
DefaultValue: 0
Resolution: 1
GridSize: [26 27]
GridLocationInWorld: [0 0]
GridOriginInLocal: [0 0]
LocalOriginInWorld: [0 0]
XLocalLimits: [0 27]
YLocalLimits: [0 26]
XWorldLimits: [0 27]
YWorldLimits: [0 26]
robotPose = simulation.BicyclePose
robotPose = 362×3
5.0000 5.0000 0
5.0001 5.0000 -0.0002
5.0007 5.0000 -0.0012
5.0036 5.0000 -0.0062
5.0181 4.9997 -0.0313
5.0902 4.9929 -0.1569
5.4081 4.8311 -0.7849
5.5189 4.6758 -1.1170
5.5366 4.6356 -1.1930
5.5512 4.5942 -1.2684
5.5620 4.5581 -1.2917
5.5722 4.5217 -1.2971
5.5868 4.4697 -1.2984
5.6055 4.4026 -1.2986
5.6311 4.3108 -1.2985
⋮
numRobots = size(robotPose, 2) / 3; thetaIdx = 3; % Translation xyz = robotPose; xyz(:, thetaIdx) = 0; % Rotation in XYZ euler angles theta = robotPose(:,thetaIdx); thetaEuler = zeros(size(robotPose, 1), 3 * size(theta, 2)); thetaEuler(:, end) = theta; for k = 1:size(xyz, 1) show(map) hold on; % Plot Start Location plotTransforms([startLoc, 0], eul2quat([0, 0, 0])) text(startLoc(1), startLoc(2), 2, 'Start'); % Plot Goal Location plotTransforms([goalLoc, 0], eul2quat([0, 0, 0])) text(goalLoc(1), goalLoc(2), 2, 'Goal'); % Plot Robot's XY locations plot(robotPose(:, 1), robotPose(:, 2), '-b') % Plot Robot's pose as it traverses the path quat = eul2quat(thetaEuler(k, :), 'xyz'); plotTransforms(xyz(k,:), quat, 'MeshFilePath',... 'groundvehicle.stl'); pause(0.01) hold off; end
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 16 objects of type patch, line, image, text.](../../examples/robotics/win64/PlanPathForABicycleRobotInSimulinkExample_05.png)
© Copyright 2019-2020 The MathWorks, Inc.