RTDE を介して UR シリーズ マニピュレーターを接続するための設定
RTDE を介して UR シリーズ マニピュレーターを接続するための各種依存関係を設定および構成する
Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators は、Universal Robots 製の協働ロボットに接続して制御するための RTDE (Real-Time Data Exchange) 機能を使用した拡張機能を提供します。協働ロボットとリアルタイムでデータを交換するための RTDE が提供する高性能インターフェイスにより、特にロボットと外部システムの間の正確な同期を必要とする用途において、より効率的で信頼性の高い制御スキームが可能になります。
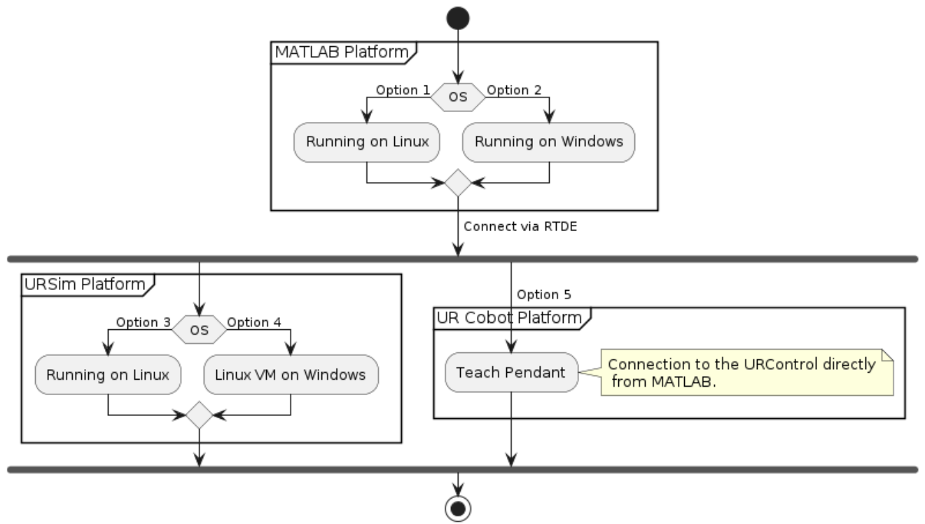
次のイメージと表に、RTDE ベースのワークフローについて、URSim オフライン シミュレーターに接続する場合とハードウェアに接続する場合のオプションをそれぞれ示します。
| 接続オプション | MATLAB® とサポート パッケージを搭載したオペレーティング システム | UR シリーズ協働ロボットまたは URSim がインストールされたオペレーティング システム | 説明 |
|---|---|---|---|
| URSim に接続 (Set Up URSim Offline Simulator for RTDEを参照) | Linux® | Linux 上の URSim | Linux で実行されている URSim に直接接続 |
| Windows® | Linux 上の URSim | Linux で実行されている URSim に直接接続 | |
| Windows | Linux VM 上の URSim | Windows でホストされた Linux VM で実行されている URSim に接続 | |
| UR シリーズ協働ロボットに接続 (Set Up UR Series Cobot for RTDEを参照) | Linux | UR シリーズ協働ロボット | UR シリーズ協働ロボットのティーチング ペンダントに MATLAB から直接接続 |
| Windows | UR シリーズ協働ロボット | UR シリーズ協働ロボットのティーチング ペンダントに MATLAB から直接接続 |
トピック
- Install Support for UR Series Hardware for RTDE
Install Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators for RTDE.
- Set Up URSim Offline Simulator for RTDE
Setup instructions for the URSim simulator from Universal Robots for controlling cobot over RTDE protocol.
- Set Up UR Series Cobot for RTDE
Set up and enable remote control from MATLAB computer to UR Series cobot for communicating over RTDE.