getCapsules
Syntax
Description
[
specifies the maximum number of capsules to return during code generation
capsules,fitInfo] = getCapsules(___,maxcollisoncapsules)maxcollisoncapsules, in addition to the input arguments from the
previous syntax. If you specify maxcollisoncapsules during MATLAB® execution, the function ignores it.
Examples
Load a robot into the workspace and visualize it.
robotIRB = loadrobot("abbIrb120");
show(robotIRB);
Create a capsule approximation of the robot, and visualize the capsule-approximated robot model.
capsIRB = capsuleApproximation(robotIRB); figure show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));
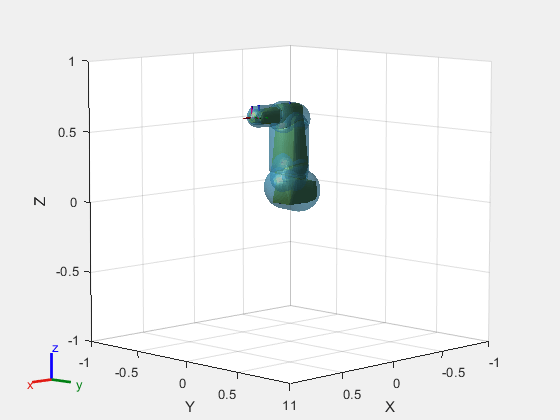
Use the getCapsules function to see if the end effector, "tool0", has any collision capsules. Because tool0 is just a frame, it has no collision mesh to approximate as a collision capsule.
capsulesTool = getCapsules(capsIRB,"tool0")capsulesTool = 1×0 empty cell array
Add a capsule to tool0, at a position 0.15 meters along the x-axis, with a radius of 0.15 and a length of 0.
addCapsule(capsIRB,"tool0",[0.15 0],trvec2tform([0.15 0 0]))
show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));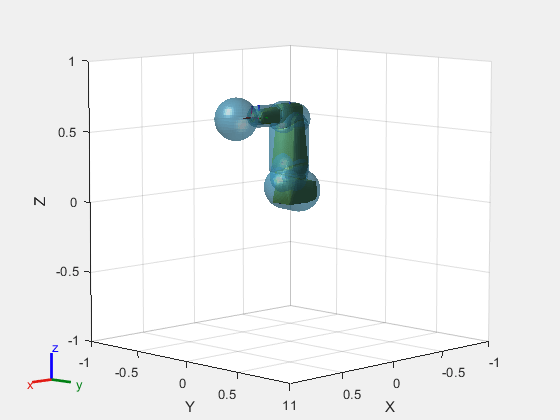
Again check tool0 for a collision capsule, and verify the properties of the detected capsule.
capsulesTool = getCapsules(capsIRB,"tool0")capsulesTool = 1×1 cell array
{1×1 collisionCapsule}
capsulesTool{1}ans =
collisionCapsule with properties:
Radius: 0.1500
Length: 0
Pose: [4×4 double]
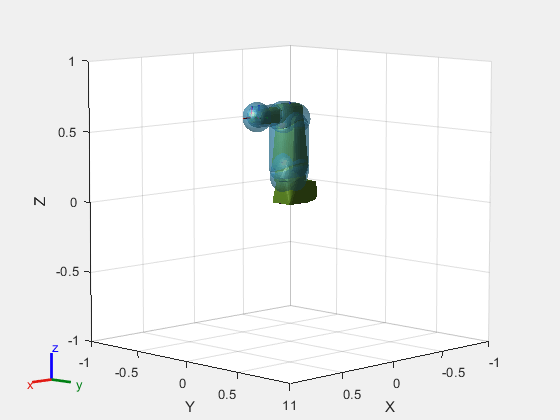
Remove the capsule from the base link. Then, reduce the collision capsule size of tool0, and move it -0.05 meters from the previous position along the x-axis.
removeCapsule(capsIRB,"base_link",1) updatePose(capsIRB,"tool0",trvec2tform([-0.05 0 0]),1) updateGeometry(capsIRB,"tool0",[.1 0.01],1) show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022b