Real-Time Data Exchange (RTDE) 接続インターフェイス入門
Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators を使用すると、Universal Robots のパッケージにより、Universal Robots 製の物理協働ロボットや URSim のシミュレーションされた協働ロボットの Real-Time Data Exchange (RTDE) を介した接続と制御が可能になります。
RTDE 用の初期設定 (RTDE を介して UR シリーズ マニピュレーターを接続するための設定を参照) が完了したら、URControl (コントロール ボックス内の Mini-ITX PC で実行される低水準ロボット コントローラー) と MATLAB® (クライアント) の間の接続を確立し、URScript ベースの関数を使用して協働ロボットをプログラムできます。
urRTDEClient オブジェクトは、ロボットの個々のジョイント角度と直交座標の姿勢を制御する機能を備えています。より高度な機能では、Robotics System Toolbox の機能を使用して、3D 空間で滑らかな軌跡を追跡するために必要なジョイント角度を計算し、事前に計算された軌跡を追跡するようにロボットに命令する方法を示します。
関数
urRTDEClient | Connect to simulated or physical cobot from Universal Robots over RTDE (R2024a 以降) |
followCartesianWaypoints | Command robot to move along the desired Cartesian waypoints (R2024a 以降) |
followJointWaypoints | Command robot to move along the desired joint space waypoints (R2024a 以降) |
readCartesianPose | Get current end-effector pose from the robot (R2024a 以降) |
readEndEffectorVelocity | Get current end-effector velocities from the robot (R2024a 以降) |
readJointConfiguration | Get current joint configuration from the robot (R2024a 以降) |
readJointVelocity | Get current joint velocities from the robot (R2024a 以降) |
readMotionStatus | Get current motion status of the robot (R2024a 以降) |
recordRobotState | Log the key robot state parameters during motion of robot (R2024a 以降) |
sendJointConfiguration | Command robot to move to desired joint configuration (R2024a 以降) |
sendJointConfigurationAndWait | Command robot to move to joint configuration and wait for the motion to complete (R2024a 以降) |
sendCartesianPoseAndWait | Command robot to move to desired Cartesian pose and wait for the motion to complete (R2024a 以降) |
manageGripperAttachment | Attach or detach gripper connected to Universal Robots cobot (R2024a 以降) |
actuateGripper | Control attached gripper with grip or release action (R2024a 以降) |
sendServoJCommands | Send Servoj commands (R2024a 以降) |
sendSpeedJCommands | Send speedj commands (R2024a 以降) |
executeURScriptCommand | Send URScript command to control cobot over RTDE interface (R2024a 以降) |
urClientRigidBodyTree | Load rigid body tree model of Universal Robots UR Series cobot (R2026a 以降) |
ブロック
| Actuate Gripper | Actuate gripper connected to cobot (R2025a 以降) |
| Read Controller Output | Read specified signals from UR Controller using RTDE interface (R2025a 以降) |
| Read Motion Status | Read motion status of cobot from UR Controller using RTDE interface (R2025a 以降) |
| Follow Joint Waypoints | Command UR Series cobot using the RTDE interface to follow a specified set of joint positions (R2025a 以降) |
| Read Joint Configuration | Read current joint configuration from UR Controller using RTDE interface (R2025a 以降) |
| Send Joint Configuration | Command the UR cobot using the RTDE interface to move to a specified joint configuration (R2025a 以降) |
注目の例
Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots Using RTDE Interface
Use the urRTDEClient object to connect to a Universal Robots cobot and move the robot using joint space control, task space control, waypoint tracking in task space, and waypoint tracking in joint space. This example uses Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators.
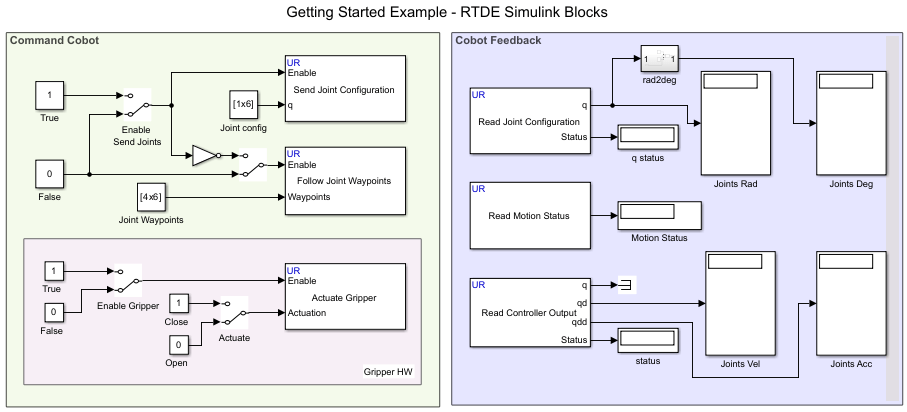
Getting Started with UR RTDE Blocks Library to Control UR Series Cobot from Simulink
Use Simulink blocks under UR RTDE Blocks Simulink Library to manipulate motion of UR Series cobot using joint configuration or joint space waypoints, and obtain feedback from the cobot.
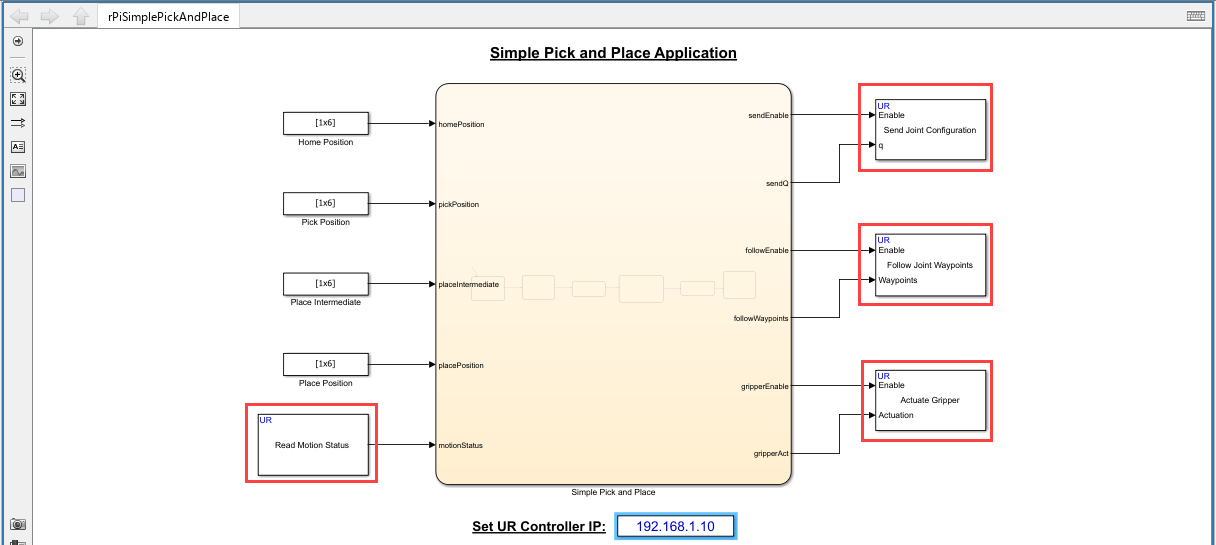
Pick and Place Objects Using Stateflow and RTDE Blocks by Deploying to a Raspberry Pi Board
Use a combination of Stateflow® and Simulink® RTDE (Real-time Data Exchange) blocks to perform a pick-and-place operation using Universal Robots UR Series cobot. The example deploys the code to a Raspberry Pi board, which acts as a controller for the connected cobot.