convertVibration
加速度計、速度センサー、または変位センサーのいずれかによる単一のセンサー出力を使用して、ベースライン補正とフィルター処理が適用された加速度、速度、および変位の信号を振動測定値から計算
R2024a 以降
構文
説明
convertVibration 関数は、加速度計の信号をベースライン補正とフィルター処理が適用された速度および変位の信号に変換します。この関数は、ISO 10816 および 20816 の振動の規格を使用して機械振動の監視を行う場合に特に便利です。convertVibration を使用して、変位または速度の測定値を 3 つの信号形式に変換することもできます。
ISO には、RMS 速度の測定値 (単位は mm/s) と RMS 変位の測定値 (単位は μm) についての規格はありますが、加速度計の測定値 (単位は g または mm/s2) についての規格はありません。convertVibration は、ハイパス フィルター処理、積分、およびベースライン補正の組み合わせを使用して、加速度計の測定値を速度と変位の両信号に正確に変換します。関数は同様のアルゴリズムを使用して位置信号を加速度に変換しますが、その場合は積分の代わりに微分が使用されます。速度信号を加速度と位置に変換するときは、微分と積分の組み合わせが使用されます。
convertVibration の出力信号の単位は、入力信号および関数で実行される積分関数または微分関数の単位と一致します。
積分 (加速度から速度など): 入力信号の単位に秒が乗算されます。したがって、たとえば m/s2 は m/s になります。
微分 (変位から速度など): 入力信号の単位が秒で除算されます。したがって、たとえば m は m/s になります。
入力の単位が g の場合、結果を m/s (速度) または m (変位) に変換するには、出力に 9.81 を乗算する必要があります。
変換された信号を返す
[___] = convertVibration(___, では、1 つ以上の名前と値の引数を使用して追加のパラメーターを指定できます。たとえば、Name=Value)T のデータが加速度信号ではなく速度信号を表す場合は、名前と値の引数 Type="velocity" を使用します。
変換された信号のプロット
convertVibration(___) は、変換された信号をプロットします。
例
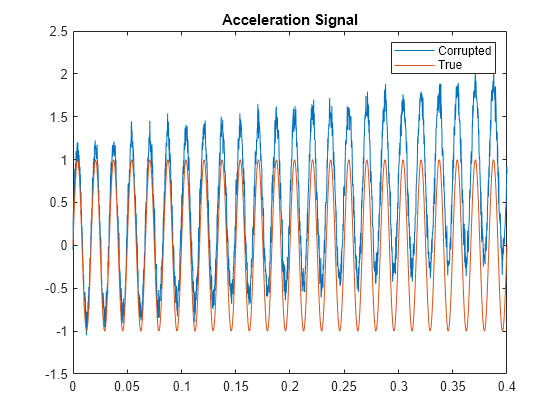
実際の加速度信号 acc_true、ノイズ、オフセット、ドリフトを含む測定加速度 acc_meas、およびサンプリング周波数 Fs で構成されるデータを読み込みます。
load acceldata acc_meas acc_true Fs
Fs から時間ベクトルを生成します。
t = (0:1/Fs:0.4);
実際の信号と破損した信号を一緒にプロットします。
plot(t,acc_meas,t,acc_true) title('Acceleration Signal') legend('Corrupted','True')
convertVibration を使用して、加速度計の信号にベースライン補正を適用し、信号を速度信号と変位信号に変換します。3 つの信号をすべてプロットする構文を使用します。
convertVibration(acc_meas, Fs);
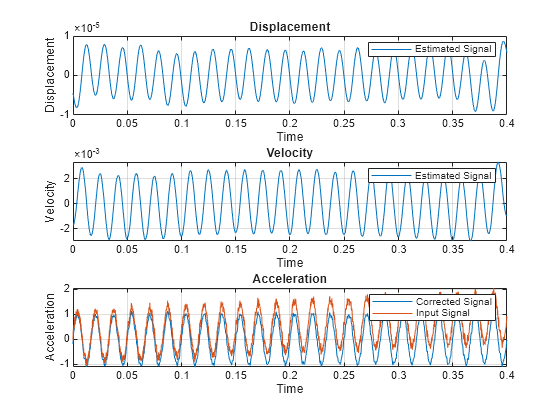
変換によって加速度信号が補正され、安定した変位信号と速度信号が得られます。
出力引数を指定して信号を保存します。
[A,V,D] = convertVibration(acc_meas,Fs);
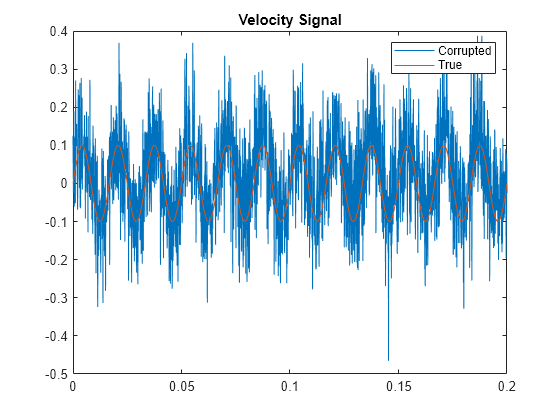
実際の速度信号 vel_true、ノイズ、オフセット、ドリフトを含む測定速度 vel_meas、およびサンプリング周波数 Fs で構成されるデータを読み込みます。信号は timetable に格納されています。
load veldata vel_meas_tt vel_true_tt Fs
Fs から時間ベクトルを生成します。
t = (0:1/Fs:0.2)';
実際の信号と破損した信号を一緒にプロットします。
plot(t,vel_meas_tt.vel,t,vel_true_tt.vel) title('Velocity Signal') legend('Corrupted','True');
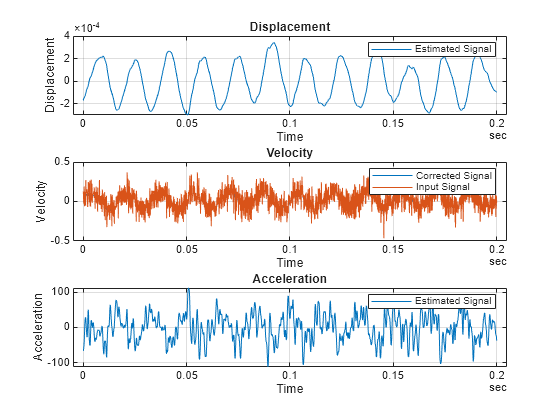
convertVibration を使用して、速度信号にベースライン補正を適用し、加速度信号と変位信号を変換して補正し、3 つすべての信号を返します。高周波数ノイズの影響を軽減するために、カットオフ周波数 Fmax を 500 に設定します。3 つのすべての信号タイプに加え、使用したオプションの情報を返します。
[a,v,d,options] = convertVibration(vel_meas_tt,Var="vel",Type="velocity",FMax=500);
使用したオプションを調べます。
options
options = struct with fields:
Fmin: 20
Fmax: 500
Type: "velocity"
Variable: "vel"
Fs: 10000
options には、周波数範囲、信号タイプ、変数名、およびサンプリング周波数の情報が格納されています。
3 つの信号をプロットします。
convertVibration(vel_meas_tt,Var="vel",Type="velocity",FMax=500);
補正された速度を実際の速度と比較します。
figure plot(t,v,t,vel_true_tt.vel) legend('Corrected Velocity','True Velocity')
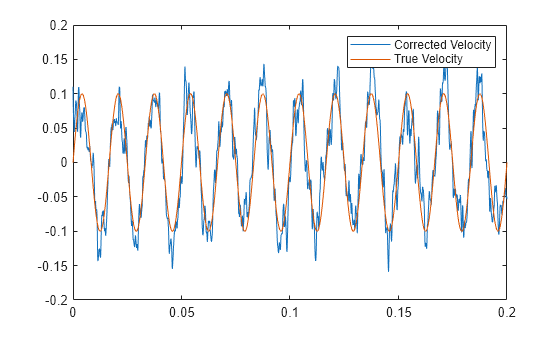
補正された速度は、測定された速度よりも、実際の速度にはるかによく適合しています。
入力引数
名前と値の引数
出力引数
アルゴリズム
convertVibration のアルゴリズムは、[1] に記載のある数値積分器の設計に基づいています。この積分器には 3 つの段階があり、それぞれの段階にオフセット キャリブレーションまたはベースライン キャリブレーション、ハイパス フィルター処理、および積分の何らかの組み合わせとシーケンスが含まれています。結果は安定した速度信号と変位信号です。次のブロック線図は [1] から応用したもので、加速度計の入力の一般的なアルゴリズムのフローを示しています。
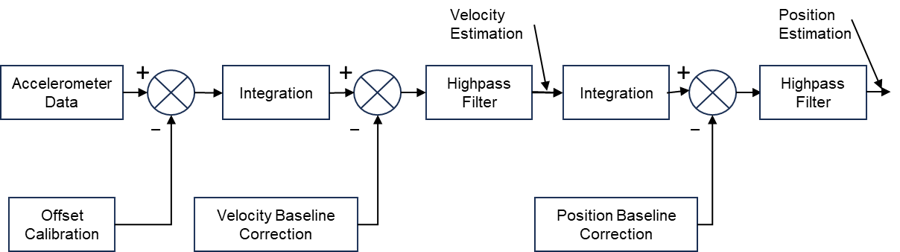
同様のアルゴリズムによって位置データが 3 つの補正出力に変換されますが、その場合は積分の代わりに微分が使用されます。convertVibration による速度データの変換には、積分と微分の組み合わせが使用されます。
参照
[1] S. Thenozhi, W. Yu and R. Garrido, "A novel numerical integrator for structural health monitoring." 2012 5th International Symposium on Resilient Control Systems, Salt Lake City, UT, USA, 2012, pp. 92-97, doi: 10.1109/ISRCS.2012.6309300.
バージョン履歴
R2024a で導入