このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
位置推定
このセクションには、レーダー、ソナー、および通信においてオブジェクトの位置推定とトラッキングを実行する適用例が含まれます。位置推定には、アクティブなシナリオとパッシブなシナリオのいずれも含まれる可能性があります。手法には、到着時間、到着時間差、到着時間和の測定が含まれます。
注目の例

Target Localization in Active and Passive Radars
Model radar networks, configure and propagate radar waveforms, and perform time-of-arrival and time-difference of arrival estimation and localization.
Source Localization and Tracking with Passive Receivers
Localize and track targets using a passive source localization (PSL) sensor network.
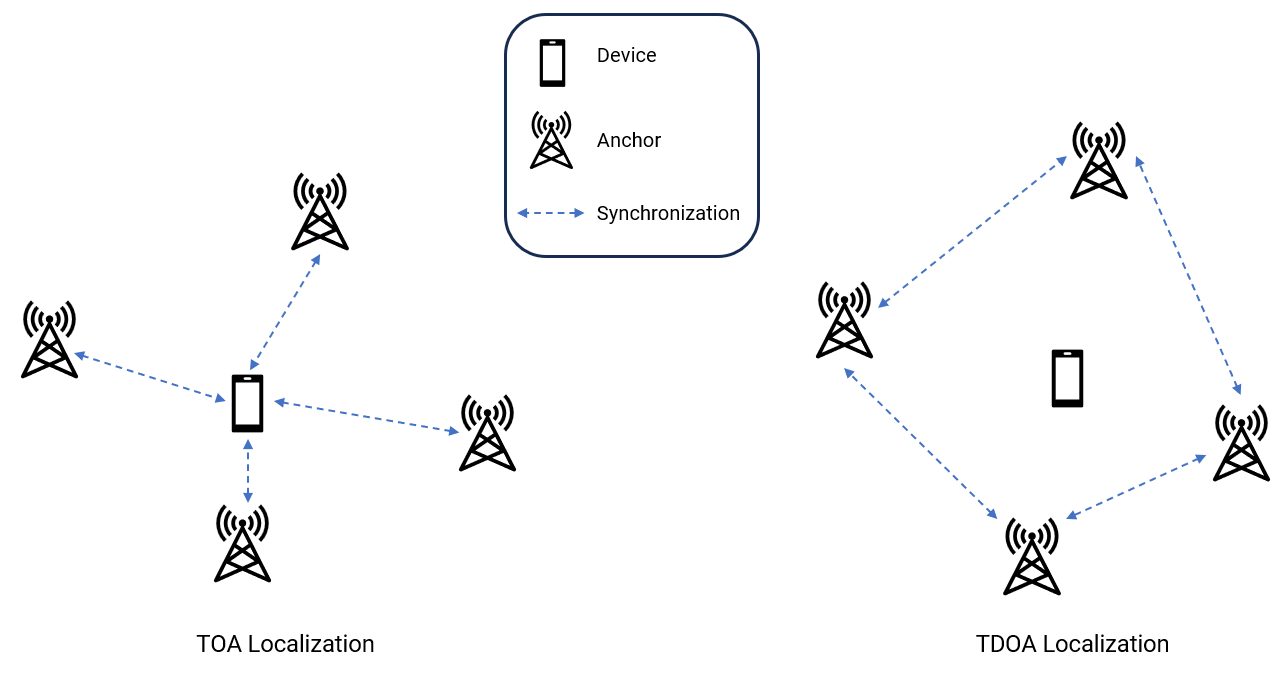
Device Localization in Wireless Systems
Build wireless sensor networks, configure and propagate wireless waveforms, and then perform TOA/TDOA estimation and localization.

Passive Bistatic Radar Localization Using OFDM Communication Signals
Demonstrate a passive bistatic radar system that utilizes a cellular tower as a separate signal source for three-dimensional target localization.
Multistatic Localization of a Ship Using GPS Illuminations
You locate a ship using received GPS signals reflecting off the ship.

Source Localization Using Generalized Cross Correlation
Determine the position of the source of a wideband signal using generalized cross-correlation (GCC) and triangulation. For simplicity, this example is confined to a two-dimensional scenario consisting of one source and two receiving sensor arrays. You can extend this approach to more than two sensors or sensor arrays and to three dimensions.

UWB Localization Using IEEE 802.15.4z
Estimate the location of a single device following the IEEE® 802.15.4z™ standard.
802.11az Three-Dimensional Tracking Using Time of Arrival Estimation
Use an IEEE 802.11az Wi-Fi network to track Wi-Fi devices in a three-dimensional space using time of arrival (TOA) estimation.

Locating an Acoustic Beacon with a Passive Sonar System
Simulate a passive sonar system. A stationary underwater acoustic beacon is detected and localized by a towed passive array in a shallow-water channel. The acoustic beacon transmits a 10 millisecond pulse at 37.5 kilohertz every second, and is modeled as an isotropic projector. The locator system tows a passive array beneath the surface, which is modeled as a uniform linear array. Once the acoustic beacon signal is detected, a direction of arrival estimator is used to locate the beacon.