このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ソナーと空間音響
Phased Array System Toolbox™ を使用すると、ターゲット反射、マルチパス伝搬、およびノイズ干渉の影響を含む、ソースから受信機までのソナー システムをモデル化できます。これらの適用例では、アクティブな検出と位置推定およびパッシブな検出と位置推定について説明しています。
注目の例
Underwater Target Detection with an Active Sonar System
Simulate an active monostatic sonar scenario with two targets. The sonar system consists of an isotropic projector array and a single hydrophone element. The projector array is spherical in shape. The backscattered signals are received by the hydrophone. The received signals include both direct and multipath contributions.

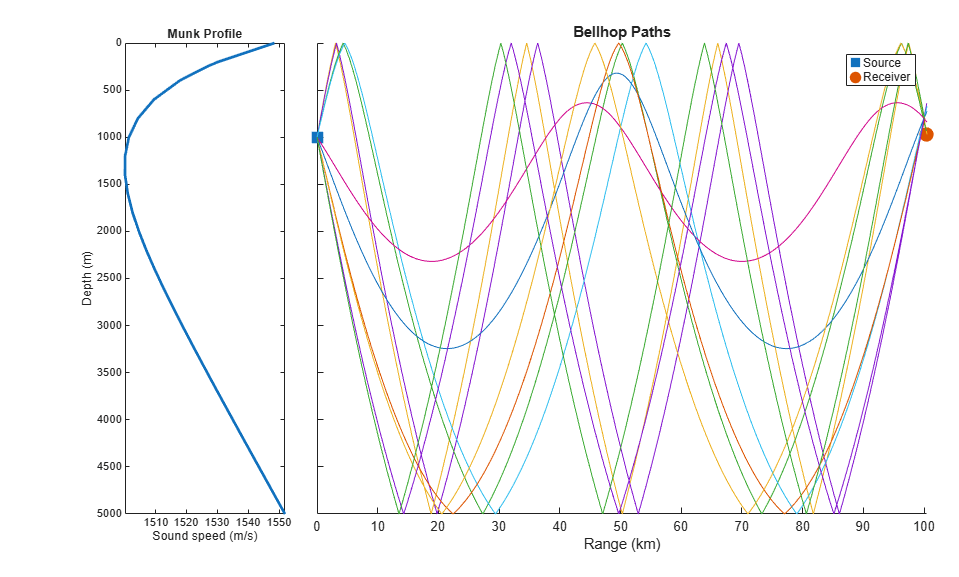
Locating an Acoustic Beacon with a Passive Sonar System
Simulate a passive sonar system. A stationary underwater acoustic beacon is detected and localized by a towed passive array in a shallow-water channel. The acoustic beacon transmits a 10 millisecond pulse at 37.5 kilohertz every second, and is modeled as an isotropic projector. The locator system tows a passive array beneath the surface, which is modeled as a uniform linear array. Once the acoustic beacon signal is detected, a direction of arrival estimator is used to locate the beacon.
マイク ULA アレイ
カージオイド マイク素子を含む 4 素子の ULA を可視化する。
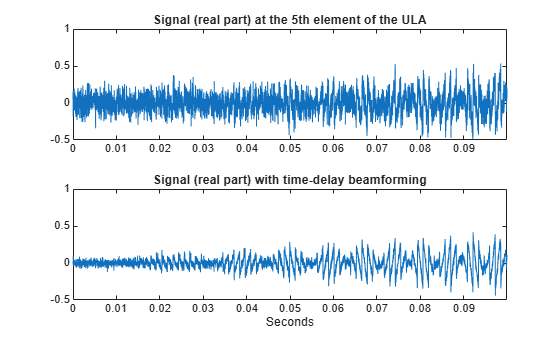
Time-Delay Beamforming of Microphone ULA Array
Perform conventional time-delay beamforming with 10-element ULA.

Acoustic Beamforming Using a Microphone Array
Illustrates microphone array beamforming to extract desired speech signals in an interference-dominant, noisy environment. Such operations are useful to enhance speech signal quality for perception or further processing. For example, the noisy environment can be a trading room, and the microphone array can be mounted on the monitor of a trading computer. If the trading computer must accept speech commands from a trader, the beamformer operation is crucial to enhance the received speech quality and achieve the designed speech recognition accuracy.

Source Localization Using Generalized Cross Correlation
Determine the position of the source of a wideband signal using generalized cross-correlation (GCC) and triangulation. For simplicity, this example is confined to a two-dimensional scenario consisting of one source and two receiving sensor arrays. You can extend this approach to more than two sensors or sensor arrays and to three dimensions.

Acoustic Beamforming Using Microphone Arrays
Beamform signals received by an array of microphones to extract a desired speech signal in a noisy environment. This Simulink® example is based on the MATLAB® example Acoustic Beamforming Using a Microphone Array for System objects.

Introduction to Differential Beamforming
Use differential beamforming to form a linear differential microphone array.

Multicore Simulation of Audio Beamforming System
How an audio beamforming system simulation model in Simulink® can have improved performance using dataflow domain. It uses the dataflow domain in Simulink to automatically partition the data-driven portions of the communications system into multiple threads and thereby improving the performance of the simulation by executing it on your desktop's multiple cores.

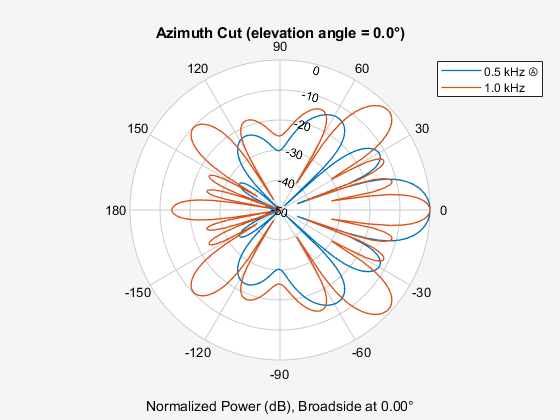
Visualization of Wideband Beamformer Performance
Plot responses of a microphone element and an array of microphone elements.