pdejmps
(Not recommended) Error estimates for adaptation
pdejmps is not recommended. Use meshes represented as
FEMesh objects instead of [p,e,t] meshes. For more
information, see Version History.
Description
errf = pdejmps(p,t,c,a,f,u,alpha,beta,m)errf correspond to triangles, and the rows correspond to the
equations in the PDE system.
The function computes the error indicator E(K) for each triangle K as
where is the unit normal of edge and the braced term is the jump in flux across the element edge. Here, α and β are weight indices, and m is an order parameter. The norm is an L2 norm computed over the element K.
Examples
Solve the Laplace equation over a circle sector, with Dirichlet boundary conditions u = cos(2/3atan2(y,x)) along the arc and u = 0 along the straight lines. Use the original coarser mesh and the refined mesh, and calculate the error indication function in both cases.
Generate and plot a mesh for the circle sector geometry.
[p,e,t] = initmesh('cirsg');
pdemesh(p,e,t)
Solve the Laplace equation.
u = assempde('cirsb',p,e,t,1,0,0);Calculate the error indication function for each mesh triangle. Use the weight indices , , and the order parameter m = 1.
alpha = 0.15; beta = 0.15; m = 1; errf = pdejmps(p,t,1,0,0,u,alpha,beta,m);
Find the maximum value of the error indication function.
max(abs(errf))
ans = 0.0306
Refine the original mesh and plot the result.
[p,e,t] = refinemesh('cirsg',p,e,t);
pdemesh(p,e,t)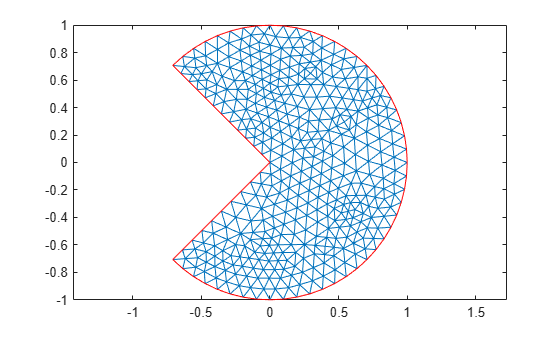
Solve the same equation on the refined mesh, and calculate the error indication function for each mesh triangle. Use the same values for the weight indices and the order parameter.
u = assempde('cirsb',p,e,t,1,0,0);
errf = pdejmps(p,t,1,0,0,u,alpha,beta,m);Find the maximum value of the error indication function.
max(abs(errf))
ans = 0.0194
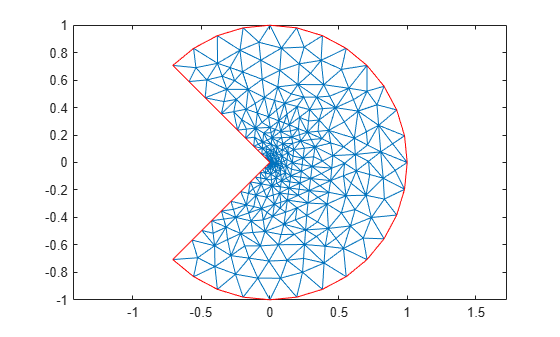
Solve the same equation using the adaptmesh function.
[u,p,e,t] = adaptmesh('cirsg','cirsb',1,0,0);
Number of triangles: 197 Number of triangles: 201 Number of triangles: 216 Number of triangles: 233 Number of triangles: 254 Number of triangles: 265 Number of triangles: 313 Number of triangles: 344 Number of triangles: 417 Number of triangles: 475 Number of triangles: 629 Maximum number of refinement passes obtained.
Plot the mesh.
pdemesh(p,e,t)
Calculate the error indication function for each mesh triangle.
errf = pdejmps(p,t,1,0,0,u,alpha,beta,m);
Find the maximum value of the error indication function.
max(abs(errf))
ans = 0.0024