シミュレーション中心の例
これらの参照例は、モーターや制御の特性を解析し、モーター制御アルゴリズムの実装を強化するのに使用します。
Motor Control Blockset™ の参照例は、モーター制御アルゴリズムを実装するためのシミュレーションとコード生成をサポートしています。ほとんどの例はサポート対象のハードウェアに自動展開 (デバイス ドライバーを事前に構成) が可能ですが、以下の例は自動展開機能が事前に構成されていません。ただし、これらの例を使用して解析を実行してから汎用 C コードを生成することで、そのコードをさらに詳しく構成して任意のマイクロコントローラーに展開することができます。任意のカスタム マイクロコントローラーへの展開用に汎用 C コードを構成するワークフローについては、カスタム ハードウェア指向の例にあるAlgorithm-Export Workflows for Custom Hardwareの例で説明しています。
注目の例
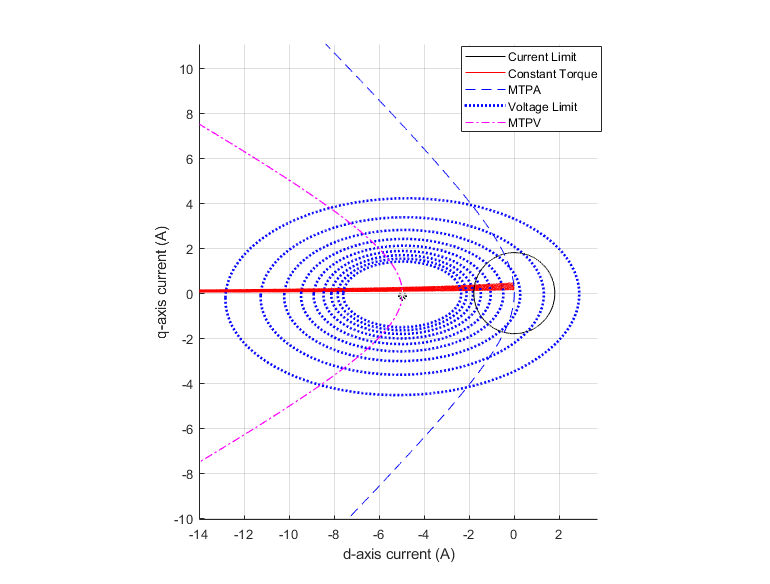
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.
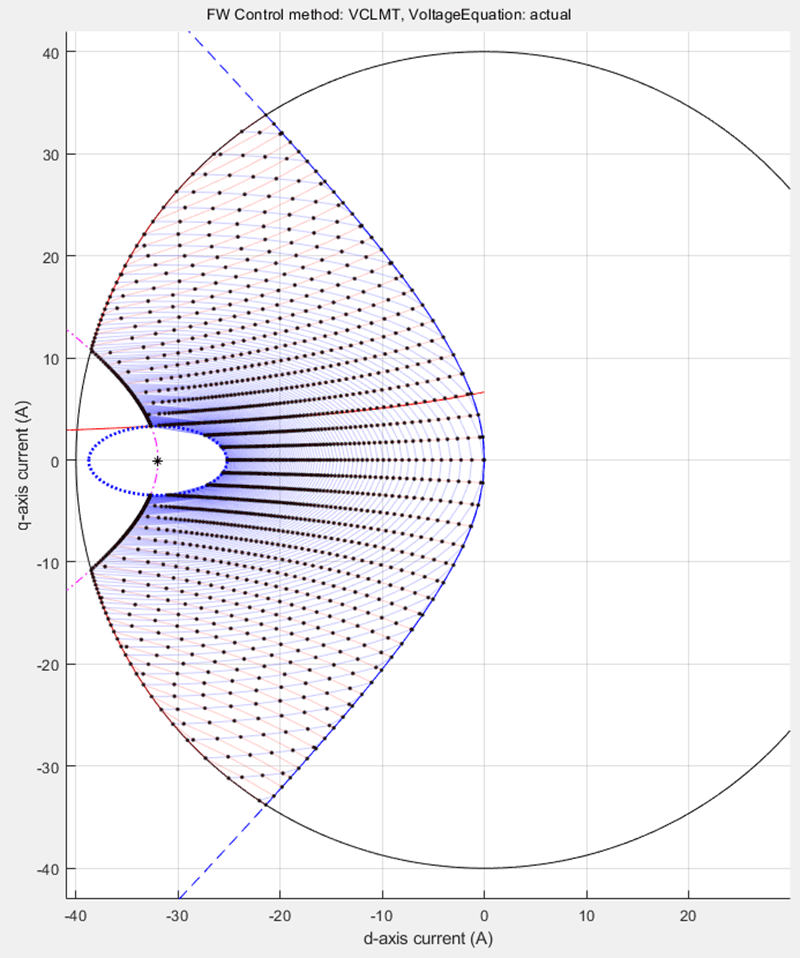
PMSM Constraint Curves and Their Application
Uses Motor Control Blockset™ to explain the fundamentals of constraint curves, utilization of these curves to determine operating currents, and usage of the grid of these currents in simulation or deployment environments.
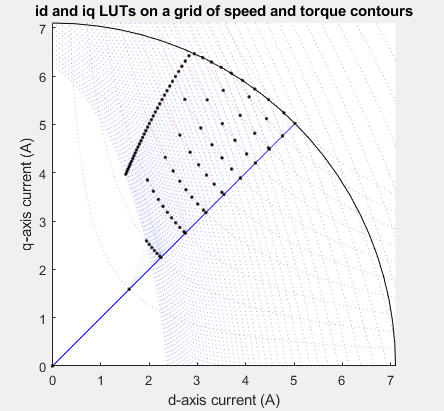
SynRM Constraint Curves and Their Application
Uses Motor Control Blockset™ to utilize the motor constraint curves to determine the operating currents and use lookup tables of these currents in simulation or deployment environments. The example uses the PMSM constraint curves described in the PMSM Drive Characteristics and Constraint Curves page.
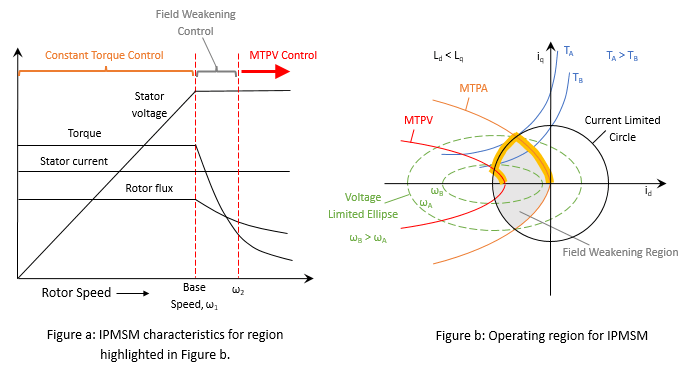
Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
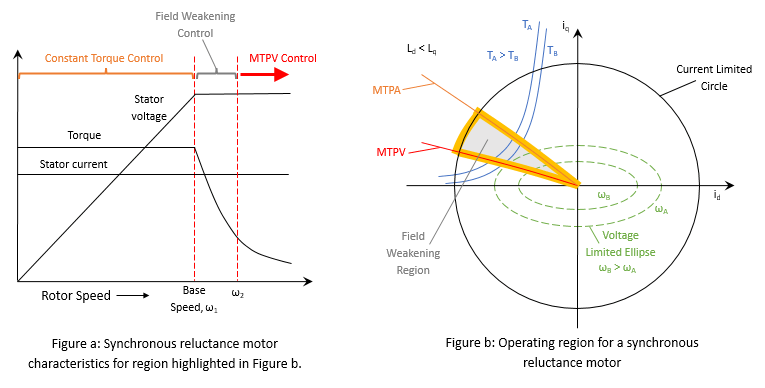
Field-Weakening Control (with MTPA) of Nonlinear Synchronous Reluctance Motors Using Lookup Table
Uses a lookup table (LUT) for a nonlinear synchronous reluctance motor and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity synchronous reluctance motor in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
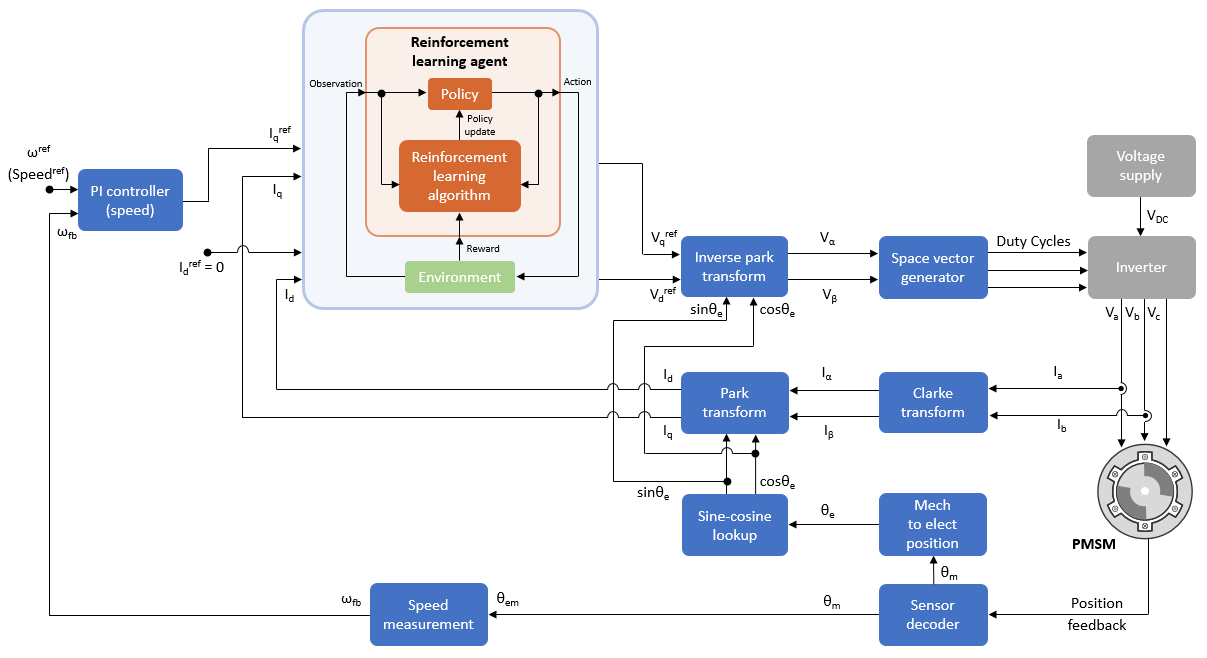
強化学習を使用した PMSM のベクトル制御
この例では、強化学習の制御設計法を使用して永久磁石同期モーター (PMSM) のベクトル制御 (FOC) を実装する方法を示します。この例では FOC の原理を使用します。ただし、PI コントローラーの代わりに強化学習 (RL) エージェントを使用します。FOC の詳細については、ベクトル制御を参照してください。

Determine Power Losses and THD for PWM Methods
Calculates the inverter power loss and total harmonic distortion (THD) in motor current for different pulse-width modulation (PWM) methods. The example uses field-oriented control (FOC) algorithm that runs a permanent-magnet synchronous motor (PMSM) in speed control mode as a reference. The example only supports simulation.
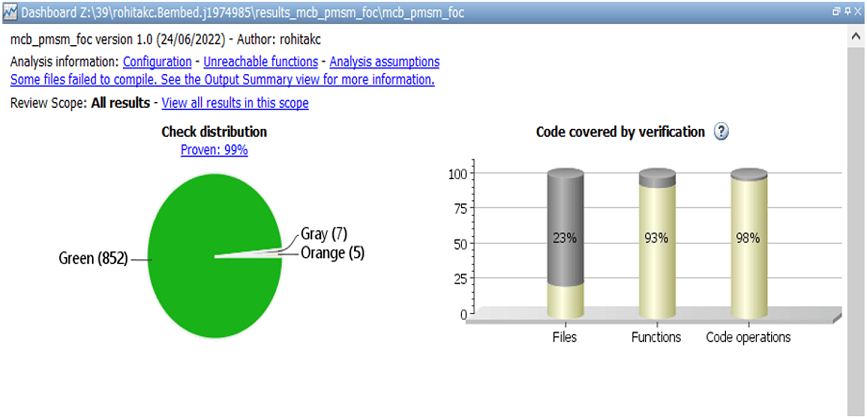
Analyze and Verify Motor Control Algorithms Using Polyspace
Uses the Polyspace® static code analysis tools to analyze and verify Simulink® models containing motor control algorithms. Static code analysis is a software verification technique that analyzes source code for quality, reliability, and security without executing the code. This approach uses robust error detection routines (that include checks for critical run-time errors) to identify bugs and defects and in addition ensures compliance with common coding standards. It provides a cost-effective alternative to measure and track the software quality metrics and eliminates the need to instrument the code or to write elaborate unit test cases.
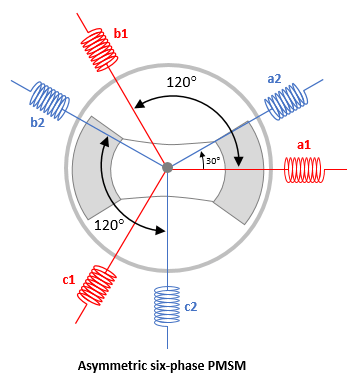
Field-Oriented Control of Six-Phase PMSM
Control the torque of an asymmetric six-phase permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).