センサー キャリブレーションと位置検出
ホール センサー、直交エンコーダー センサー、および ADC のホール シーケンスとオフセットを計算して、位置と電流のフィードバック値を正確に計算します。
ブロック
| Hall Speed and Position | Compute speed and estimate position of rotor by using Hall sensors |
| Hall Validity | Compute rotor spin direction and validity of Hall sensor sequence |
| Quadrature Decoder | Compute position of quadrature encoder |
| Resolver Decoder | Compute motor mechanical position and speed and sine and cosine values of motor electrical position |
| Mechanical to Electrical Position | Compute electrical position of rotor from mechanical position |
| Speed Measurement | Compute speed from rotor angular position |
トピック
- ADC Offset Calibration in FOC
Calibrate for ADC Offset in FOC.
- Position Sensor Offset Calibration for Quadrature Encoder and Hall Sensor
Calibrate for sensor-based control using blocks available in Motor Control Blockset.
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
注目の例

Hall Offset Calibration for PMSM
Calculates the offset between the rotor direct axis (d-axis) and position detected by the Hall sensor. The field-oriented control (FOC) algorithm needs this position offset to run the permanent magnet synchronous motor (PMSM) correctly. To compute the offset, the target model runs the motor in the open-loop condition. The model uses a constant (voltage along the stator's
d-axis) and a zero (voltage along the stator's
q-axis) to run the motor (at a low constant speed) by using a position or ramp generator. When the position or ramp value reaches zero, the corresponding rotor position is the offset value for the Hall sensors.

Quadrature Encoder Offset Calibration for PMSM
Calculates the offset between the d-axis of the rotor and encoder index pulse position as detected by the quadrature encoder sensor. The control algorithm (available in the field-oriented control and parameter estimation examples) uses this offset value to compute an accurate and precise position of the d-axis of rotor. The controller needs this position to implement the field-oriented control (FOC) correctly in the rotor flux reference frame (d-q reference frame), and therefore, run the permanent magnet synchronous motor (PMSM) correctly.

開ループ制御での三相 AC モーターの駆動と ADC オフセットのキャリブレーション
この例では、開ループ制御 (スカラー制御またはボルト/ヘルツ制御とも呼ばれる) を使用してモーターを駆動します。この手法では、モーターからのいずれのフィードバックも使用せずに、固定子電圧と周波数を変えて回転子速度を制御します。この手法を使用してハードウェア接続の整合性を確認できます。開ループ制御の一定速度のアプリケーションでは、固定周波数のモーター電源を使用します。開ループ制御の可変速度のアプリケーションでは、回転子速度を制御するために可変周波数の電源が必要です。固定子の磁束を一定に保つために、電源電圧の振幅がその周波数と比例するように維持します。

BLDC モーターのホール センサー シーケンス キャリブレーション
この例では、開ループ制御における回転子の位置ゼロに関するホール センサー シーケンスを計算します。このワークフローは、ホール センサーにラベルを付けたり、スイッチング シーケンスを派生したりすることなく、6 段階整流を使用してモーターを回転できるようにします。この例を実行してホール シーケンスを取得し、そのホール シーケンスを Six Step Commutation ブロックで使用して、センサー フィードバックを使用した BLDC モーターの 6 段階整流の例で説明されているように閉ループでモーターを駆動します。
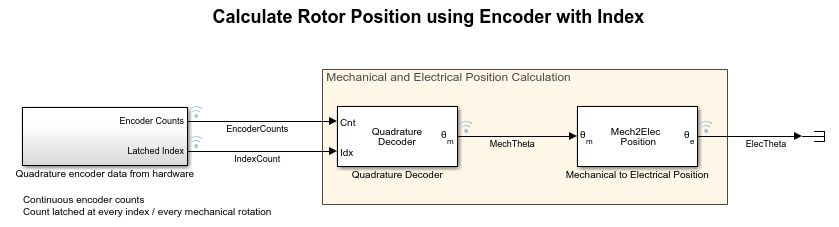
Simulate Calculation of Rotor Position Using Quadrature Decoder Block
Use the quadrature decoder block to simulate estimation of rotor position.
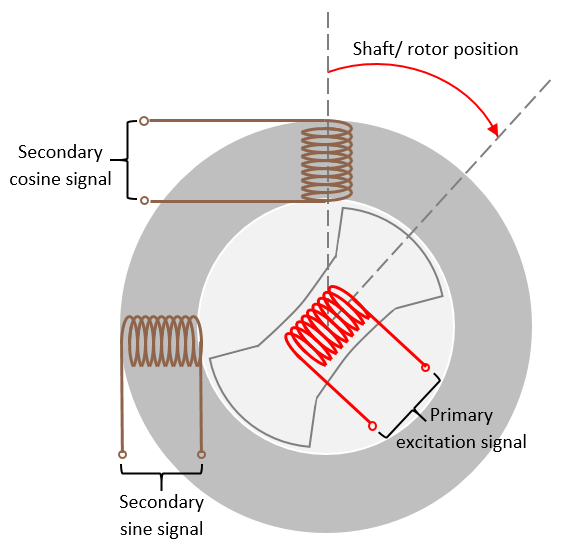
Monitor Resolver Using Serial Communication
Use the resolver sensor to measure the rotor position. The resolver consists of two stator (secondary) windings placed orthogonally around the resolver rotor (primary) winding. After you mount the resolver sensor over a PMSM, the resolver rotor winding rotates with the shaft of the running motor. Meanwhile, the controller provides a fixed-frequency excitation signal (alternating sinusoidal or square pulse) to the primary winding.