位置検出のためのセンサーレス手法
FOC アルゴリズムでは、速度制御を実装するとともに、基準固定子電圧およびフィードバック電流に対して数学的変換を実行するために、リアルタイムの回転子位置フィードバックが必要です。従来、このようなアルゴリズムは物理センサーに依存してきました。しかし、精度の向上とコスト効率の高さにより、センサーレス位置推定ソリューションは物理センサーに代わる、より優れた選択肢となり得ます。
センサーレス オブザーバーおよびアルゴリズムには、ベース速度を超えるモーターの動作に関して既知の制限があります。センサーレスの例はベース速度までの動作にのみ使用することをお勧めします。
ブロック
| Sliding Mode Observer | Compute electrical position and mechanical speed of rotor |
| Flux Observer | Compute electrical position, magnetic flux, and electrical torque of rotor |
| Pulsating High Freq Observer | Estimate initial rotor electrical position of interior PMSM using pulsating high frequency (PHF) injection (R2022b 以降) |
| Extended EMF Observer | Compute electrical position and mechanical speed of permanent magnet synchronous motor (PMSM) (R2023a 以降) |
トピック
- How to Tune Sensorless Position Estimators
Tune sensorless position estimators for accurate position and speed measurements.
- PMSM のセンサーレス ベクトル制御
この例では、三相永久磁石同期モーター (PMSM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。
- 誘導モーターのセンサーレス ベクトル制御
この例では、センサーレス位置推定を使用して、三相交流誘導モーター (ACIM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。
注目の例

Estimate Initial Rotor Position Using Pulsating High-Frequency and Dual-Pulse Methods
Estimates the initial position (in electrical radians) of a stationary interior PMSM by using pulsating high-frequency (PHF) injection and dual pulse (DP) techniques.

Initial Position Estimation and Field-Weakening Control of IPMSM Using Pulsating High-Frequency Injection and Extended EMF Observer
Uses sensorless techniques such as pulsating high-frequency injection and extended EMF observer to estimate and track motor position to run an interior permanent magnet synchronous motor (IPMSM) operation using field-weakening control (FWC).
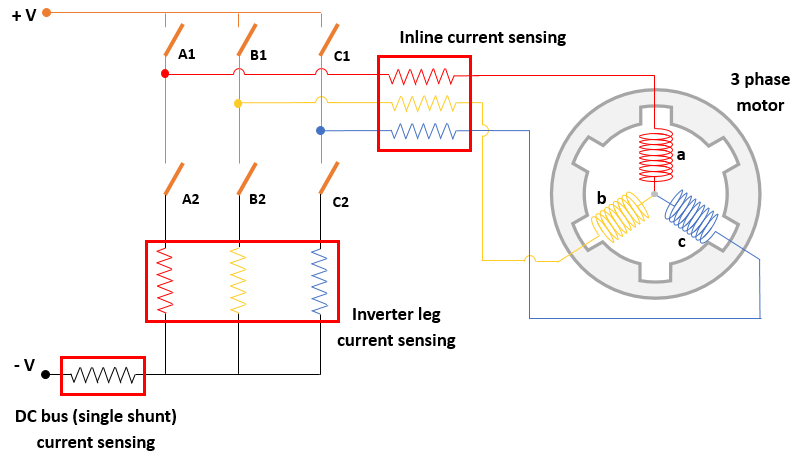
Sensorless Field-Oriented Control of PMSM Using DC Shunt Current Sensing
Implement sensorless field-oriented control (FOC) using only a single DC bus-based current measurement to run a permanent magnet synchronous motor (PMSM).

Sensorless Field-Oriented Control of PMSM Using I-F Control-Based Startup
Implements field-oriented control (FOC) using sensorless position estimation and I-F control-based startup to control the speed of a three-phase permanent magnet synchronous motor (PMSM).