このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
確率的目的関数の最適化
この例では、patternsearch を使用して確率的目的関数の最小値を見つける方法を示します。また、Optimization Toolbox ™ ソルバーがこのタイプの問題に適していないことも示しています。この例では、ノイズによって乱される単純な 2 次元の目的関数を使用します。
初期化
X0 = [2.5 -2.5]; % Starting point. LB = [-5 -5]; % Lower bound UB = [5 5]; % Upper bound range = [LB(1) UB(1); LB(2) UB(2)]; Objfcn = @smoothFcn; % Handle to the objective function. % Plot the smooth objective function fig = figure('Color','w'); showSmoothFcn(Objfcn,range); hold on; title('Smooth objective function'); ph = []; ph(1) = plot3(X0(1),X0(2),Objfcn(X0)+30,'or','MarkerSize',10,'MarkerFaceColor','r'); hold off; ax = gca; ax.CameraPosition = [-31.0391 -85.2792 -281.4265]; ax.CameraTarget = [0 0 -50]; ax.CameraViewAngle = 6.7937; % Add legend information legendLabels = {'Start point'}; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)];

滑らかな目的関数でfminconを実行する
目的関数は滑らかです(2 回連続微分可能)。Optimization Toolbox fmincon ソルバーを使用して最適化問題を解きます。fmincon は、複数の変数の関数の制約付き最小値を見つけます。この関数は、点 x* = [-5,-5] で一意の最小値を持ち、その値は f(x*) = -250 になります。
反復表示を返すようにオプションを設定します。
options = optimoptions(@fmincon,'Algorithm','interior-point','Display','iter'); [Xop,Fop] = fmincon(Objfcn,X0,[],[],[],[],LB,UB,[],options)
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 -1.062500e+01 0.000e+00 2.004e+01
1 6 -1.578420e+02 0.000e+00 5.478e+01 6.734e+00
2 9 -2.491310e+02 0.000e+00 6.672e+01 1.236e+00
3 12 -2.497554e+02 0.000e+00 2.397e-01 6.310e-03
4 15 -2.499986e+02 0.000e+00 5.065e-02 8.016e-03
5 18 -2.499996e+02 0.000e+00 9.708e-05 3.367e-05
6 21 -2.500000e+02 0.000e+00 1.513e-04 6.867e-06
7 24 -2.500000e+02 0.000e+00 1.161e-06 6.920e-08
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the value of the optimality tolerance,
and constraints are satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Xop = 1×2
-5.0000 -5.0000
Fop = -250.0000
figure(fig);
hold on;
最終点をプロットする
ph(2) = plot3(Xop(1),Xop(2),Fop,'dm','MarkerSize',10,'MarkerFaceColor','m'); % Add a legend to plot legendLabels = [legendLabels, '|fmincon| solution']; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off;

確率的目的関数
ここで、ランダムノイズを追加して目的関数を乱します。
rng(0,'twister') % Reset the global random number generator peaknoise = 4.5; Objfcn = @(x) smoothFcn(x,peaknoise); % Handle to the objective function. % Plot the objective function (non-smooth) fig = figure('Color','w'); showSmoothFcn(Objfcn,range); title('Stochastic objective function') ax = gca; ax.CameraPosition = [-31.0391 -85.2792 -281.4265]; ax.CameraTarget = [0 0 -50]; ax.CameraViewAngle = 6.7937;

確率的目的関数でfminconを実行する
摂動された目的関数は確率的であり、滑らかではありません。fmincon は、目的関数の導関数を使用して局所的最小値を見つける一般的な制約付き最適化ソルバーです。目的関数の 1 次導関数を指定しない場合は、fmincon は有限差分を使用して導関数を近似します。この例では、目的関数はランダムなので、有限差分推定による導関数は信頼できない可能性があります。fmincon は、最小値ではないポイントで停止する可能性があります。これは、ノイズのせいで最終時点で最適条件が満たされたように見えるか、fmincon がそれ以上先に進めなかったために発生する可能性があります。
[Xop,Fop] = fmincon(Objfcn,X0,[],[],[],[],LB,UB,[],options)
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 -1.925772e+01 0.000e+00 2.126e+08
1 6 -7.107849e+01 0.000e+00 2.623e+08 8.873e+00
2 11 -8.055890e+01 0.000e+00 2.401e+08 6.715e-01
3 20 -8.325315e+01 0.000e+00 7.348e+07 3.047e-01
4 48 -8.366302e+01 0.000e+00 1.762e+08 1.593e-07
5 64 -8.591081e+01 0.000e+00 1.569e+08 3.111e-10
Local minimum possible. Constraints satisfied.
fmincon stopped because the size of the current step is less than
the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Xop = 1×2
-4.9628 2.6673
Fop = -85.9108
figure(fig); hold on; ph = []; ph(1) = plot3(X0(1),X0(2),Objfcn(X0)+30,'or','MarkerSize',10,'MarkerFaceColor','r'); ph(2) = plot3(Xop(1),Xop(2),Fop,'dm','MarkerSize',10,'MarkerFaceColor','m'); % Add legend to plot legendLabels = {'Start point','|fmincon| solution'}; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off;

patternsearch を実行
ここで、Global Optimization Toolbox patternsearch ソルバーを使用して確率的目的関数を最小化します。パターン探索最適化手法は、最適化のための直接探索方法の一種です。パターン探索アルゴリズムは、最適なポイントを見つけるために目的関数の導関数を使用しません。
PSoptions = optimoptions(@patternsearch,'Display','iter'); [Xps,Fps] = patternsearch(Objfcn,X0,[],[],[],[],LB,UB,PSoptions)
Iter Func-count f(x) MeshSize Method
0 1 -7.20766 1
1 3 -34.7227 2 Successful Poll
2 3 -34.7227 1 Refine Mesh
3 5 -34.7227 0.5 Refine Mesh
4 8 -96.0847 1 Successful Poll
5 10 -96.0847 0.5 Refine Mesh
6 13 -132.888 1 Successful Poll
7 15 -132.888 0.5 Refine Mesh
8 17 -132.888 0.25 Refine Mesh
9 20 -197.689 0.5 Successful Poll
10 22 -197.689 0.25 Refine Mesh
11 24 -197.689 0.125 Refine Mesh
12 27 -241.344 0.25 Successful Poll
13 29 -241.344 0.125 Refine Mesh
14 31 -254.624 0.25 Successful Poll
15 33 -254.624 0.125 Refine Mesh
16 35 -254.624 0.0625 Refine Mesh
17 37 -254.624 0.03125 Refine Mesh
18 39 -254.624 0.01562 Refine Mesh
19 41 -254.624 0.007812 Refine Mesh
20 42 -256.009 0.01562 Successful Poll
21 44 -256.009 0.007812 Refine Mesh
22 47 -256.009 0.003906 Refine Mesh
23 50 -256.009 0.001953 Refine Mesh
24 53 -256.009 0.0009766 Refine Mesh
25 56 -256.009 0.0004883 Refine Mesh
26 59 -256.009 0.0002441 Refine Mesh
27 62 -256.009 0.0001221 Refine Mesh
28 65 -256.009 6.104e-05 Refine Mesh
29 68 -256.009 3.052e-05 Refine Mesh
30 71 -256.009 1.526e-05 Refine Mesh
Iter Func-count f(x) MeshSize Method
31 74 -256.009 7.629e-06 Refine Mesh
32 77 -256.009 3.815e-06 Refine Mesh
33 80 -256.009 1.907e-06 Refine Mesh
34 83 -256.009 9.537e-07 Refine Mesh
patternsearch stopped because the mesh size was less than options.MeshTolerance.
Xps = 1×2
-4.9688 -5.0000
Fps = -256.0095
figure(fig); hold on; ph(3) = plot3(Xps(1),Xps(2),Fps,'dc','MarkerSize',10,'MarkerFaceColor','c'); % Add legend to plot legendLabels = [legendLabels, 'Pattern Search solution']; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off
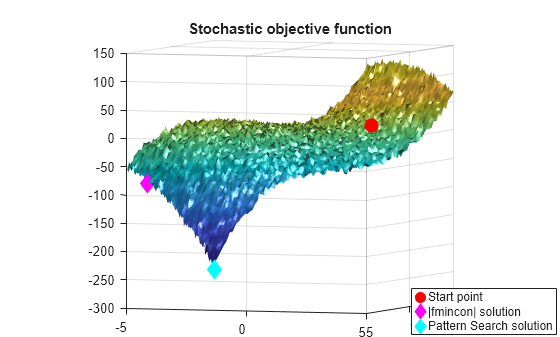
パターン探索は、目的関数内のランダムノイズの影響をそれほど受けません。パターン探索には関数値のみが必要であり、導関数は必要ないため、ノイズ (ある種の均一な種類) はパターン探索に影響を与えない可能性があります。ただし、パターン探索では、導関数ベースのアルゴリズムよりも真の最小値を見つけるために多くの関数評価が必要であり、導関数を使用しないことによるコストがかかります。
Copyright 2012–2024 The MathWorks, Inc.