トラッキング シナリオ デザイナー
トラッキング シナリオの設計、プラットフォームとセンサーの構成、合成オブジェクト検出の生成
説明
トラッキング シナリオ デザイナー アプリを使用すると、推定およびトラッキング システムをテストするための合成トラッキング シナリオを設計および可視化できます。
このアプリを使用して、以下を行うことができます。
トラッキング シナリオで、対話的なインターフェイスを使用してプラットフォーム (飛行機、車、タワー、ボートなど) を作成し、プラットフォームのプロパティを構成する。
トラッキング シナリオでウェイポイント軌跡を使用して、プラットフォームの 2 次元または 3 次元の軌跡 (位置、方向、速度を含む) を構成する。
プラットフォームに取り付けられたレーダー センサーを作成し、センサーのプロパティを構成する。
トラッキング シナリオをシミュレーションし、プラットフォームの軌跡、センサーのカバレッジ、オブジェクトの検出を動的に可視化する。
シナリオとセンサーの MATLAB® コードを生成してから、アプリケーションの目的に合わせてシナリオをプログラムで変更する。以前に保存したシナリオをアプリに再度インポートして、さらにシミュレーションを行うこともできます。
トラッキング シナリオの可視化とさらなる設計のためにアプリで
trackingScenarioオブジェクトをインポートする。trackingScenarioオブジェクトのインポートの制限については、プログラムでの使用を参照してください。
トラッキング シナリオ デザイナー アプリを開く
MATLAB ツールストリップ: [アプリ] タブの [レーダーとトラッキング] の下にあるアプリ アイコン
 をクリックします。
をクリックします。 MATLAB コマンド プロンプト: 「
trackingScenarioDesigner」と入力します。
例
トラッキング シナリオ デザイナーを起動するには、次のコマンドを使用します。
trackingScenarioDesigner
アプリでプラットフォームを追加するには、[プラットフォーム] タブから 1 つのプラットフォーム (タワーなど) を選択し、[プラットフォーム キャンバス] をクリックしてプラットフォームを配置します。
![]()
プラットフォームのプロパティは、[プラットフォームのプロパティ] タブから変更できます。たとえば、プラットフォームの中心を原点に設定するには、[初期姿勢] ですべての初期位置座標をゼロに設定します。
![]()
プラットフォームの [長さ]、[幅]、および [高さ] を変更することもできます。既定では、Tower プラットフォームの z 方向のオフセットはプラットフォームの高さの半分であり、タワーの中心はその最下部に配置されます。オフセットがゼロの場合、プラットフォームの中心はタワーの幾何学的中心と同じ位置に配置されます。
![]()
中心のオフセットは、プラットフォームの幾何学的中心からプラットフォームの指定された中心までの位置ベクトルとして定義されます。
アプリで、[姿勢推定] タブを使用して、プラットフォームの姿勢推定の不確かさを指定することもできます。タブ内の各パラメーターの値は、対応する数量の標準偏差を表します。標準偏差の設定は、実際のトラッキングを考慮する場合に役立ちます。たとえば、タワーの姿勢に誤差が含まれている場合、タワーに取り付けられたセンサーの精度が影響を受けます。アプリでは、センサーが取り付けられたプラットフォームに対して標準偏差を非ゼロの値に設定すると、その標準偏差によって生じるセンサー検出の不正確さを確認できます。
![]()
アプリで他のプラットフォームを追加することもできます。キャンバス上に "飛行機" プラットフォームを追加し、その初期位置を [50, -50, 100] に設定します。飛行機の中心 (赤) が既定では幾何学的中心にあることがわかります。
![]()
[プラットフォーム ギャラリー エディター] を使用すると、任意のクラスの既定の設定を変更 (および新しいクラスを定義) できます。このエディターは、[プラットフォーム] タブのドロップダウン矢印をクリックして開くことができます。
![]()
現在使用しているプラットフォームのクラスは編集できません。プラットフォームを削除するには、ドロップダウン リストからプラットフォームを選択し、削除 (ごみ箱) アイコンをクリックします。
![]()
トラッキング シナリオ デザイナーを起動するには、次のコマンドを使用します。
trackingScenarioDesigner
プラットフォーム キャンバスに Plane プラットフォームを追加し、[初期姿勢] タブで次のように初期位置を指定して、飛行機を [0, 0, 1000] に配置します。
![]()
次に、プラットフォームにいくつかのウェイポイントを追加します。プラットフォームを右クリックして [ウェイポイントの追加] を選択するか、プラットフォームを選択して [軌跡] ツールストリップで [ウェイポイント] をクリックします。次に、キャンバスをクリックしてウェイポイントを追加することを繰り返します。アクションを終了するには、キーボードの "Enter" キーを押します。ウェイポイントをドラッグして軌跡を変更できます。指定した軌跡は、[プラットフォーム中心のオフセット] タブで定義されたプラットフォームの中心の軌跡を表します。
![]()
[軌跡] タブで、[軌跡コース] および [プラットフォームの向き] パラメーターが Auto に設定されている場合、アプリはすべてのウェイポイントを含む滑らかな曲線で当てはめ、プラットフォームの向きを軌跡に合わせることで、軌跡を計算します。[時間] が Auto に設定されている場合、アプリは既定のプラットフォーム速度に基づいて軌跡の所要時間 ([時間]) を計算します。これは [プラットフォーム ギャラリー エディター] で指定できます。
![]()
[時間] に Auto が選択されている場合、[加加速度の範囲] を Manual に設定して、任意の正確な加加速度 (加速度を微分したもの) の範囲を指定することもできます。
![]()
下に軌跡テーブルを表示するには、[軌跡テーブル] をクリックします。時間-高度プロットを表示するには、[時間-高度プロット] をクリックします。速度と加速度のプロファイルを表示するには、[速度と加速度] をクリックします。
![]()
軌跡パラメーターの選択を Auto から Table に変更した後に、[軌跡テーブル] で対応する数量を編集できます。テーブルを編集した後に、軌跡の変更を確認します。
時間-高度プロットで点を上下にドラッグして高度を変更できます。[時間] を [テーブル] に設定した後に、点を左右にドラッグして時間を前後に移動できます。
![]()
軌跡を削除するには、軌跡を選択し、[軌跡の削除] をクリックします。
![]()
MAT ファイル TSD_Platforms は、トラッキング シナリオ セッションで以前に保存されました。アプリケーションを起動してセッション ファイルを読み込むには、次のコマンドを使用します。
trackingScenarioDesigner('TSD_Platforms.mat')
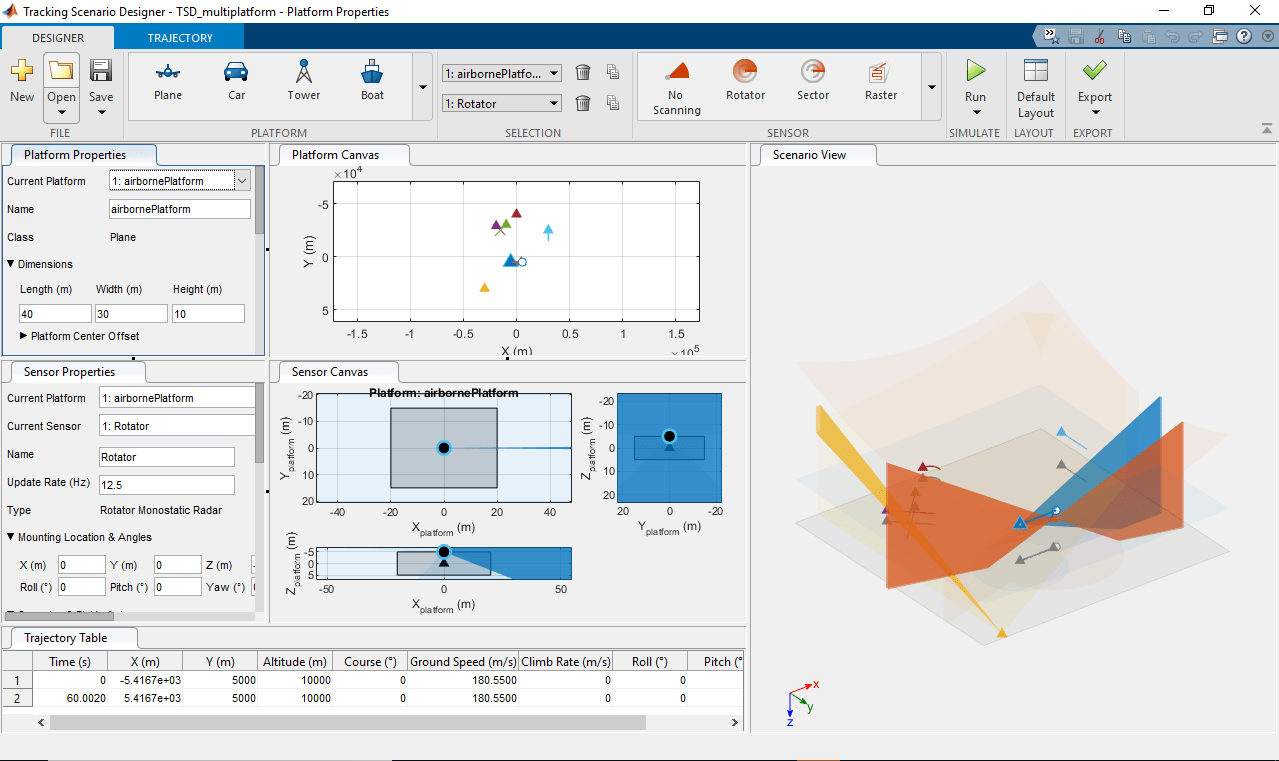
アプリケーションが開き、シナリオが読み込まれます。このシナリオには、次の 2 つのプラットフォームが含まれています。
ローカル NED 座標系の原点に位置する高さ 60 メートルのタワー。
タワーの周りを 750 m/s のコース速度で移動するターゲット。
![]()
次に、タワーの上部にセンサーを取り付けて周囲を監視します。アプリでは、4 つの事前定義のセンサー クラスが使用できます。
![]()
ドロップダウン矢印をクリックして、既存のクラスを編集したり、センサーの新しいクラスを追加したりすることもできます。
アプリで、タワー プラットフォームを選択し、回転式センサーを選択して、タワーの上部に配置します。投影ボタンをクリックして、y-z 投影ビューを有効にします。
![]()
センサーは既定でタワーの最下部に配置されます。センサーをタワーの上部に移動するには、その [取り付け位置および角度] を変更します。
![]()
[仰角のレポート] を選択して、仰角の検出を有効にします。センサーの [仰角] の [視野] を 15 度に設定して、仰角の広いカバレッジ領域を可能にします。[仰角] の [機械的スキャン範囲] を [-15, -5] 度に設定して、センサーが "上を向く" ようにします。
![]()
トラッキング シナリオをシミュレーションし、センサーによって生成されたターゲットの検出を確認するために、[実行] をクリックします。([検出なしの実行] を選択することもできます。)
![]()
センサーで検出が 1 つだけ生成されていることがわかります。次の 2 つのパラメーターを使用してスキャン レートを調整することで、センサーのスキャンを高速化し、より多くの検出を生成できます。
更新頻度 — センサーが 1 秒あたりにステップスルーする視野スライスの数を決定します。
視野 — 各センサーの視野スライスまたはビームの幅を決定します。
アプリで、センサーの [更新頻度] を 200 Hz に増やします。方位角の視野を 1 度に設定すると、結果の方位角のスキャン レートは 200 deg/s となり、既定の [最大スキャン レート] (75 deg/s) を上回ります。[最大スキャン レート] を 300 deg/s に上げて、高いスキャン レートを可能にします。
[実行] をクリックして、再度シナリオをシミュレーションします。センサーは複数の検出セットを生成するようになりました。
![]()
[エクスポート] をクリックしてシナリオのスクリプトをエクスポートすることもできます。エクスポートされたスクリプトを使用すると、シナリオをプログラムで変更し、生成されたシナリオを使用してさまざまなトラッキング アルゴリズムをテストできます。生成されたシナリオを変更する方法の詳細については、Design and Simulate Tracking Scenario with Tracking Scenario Designerの例を参照してください。
関連する例
パラメーター
[プラットフォームのプロパティ] パラメーターを有効にするには、シナリオに少なくとも 1 つのプラットフォームを追加します。次に、[プラットフォーム キャンバス] または [プラットフォームのプロパティ] パラメーターからプラットフォームを選択します。[プラットフォームのプロパティ] タブのパラメーター値は、選択したプラットフォームに基づきます。
| パラメーター | 説明 |
|---|---|
| 現在のプラットフォーム | 現在選択されているプラットフォーム。シナリオ内のプラットフォームのリストとして指定します。 |
| 名前 | プラットフォームの名前。string として指定します。 |
| クラス | プラットフォーム クラス。 |
[プラットフォーム ギャラリー エディター] を使用して、4 つのプラットフォーム クラスの既定の設定 ([速度] など) を変更したり、新しいプラットフォーム クラスを追加したりできます。[プラットフォーム] タブのドロップダウン矢印をクリックし、[プラットフォーム ギャラリーの追加/編集] を選択すると、エディターを開くことができます。
プラットフォームの寸法。[長さ]、[幅]、および [高さ] としてメートル単位で指定します。
| パラメーター | 説明 |
|---|---|
| 長さ (m) | プラットフォームの長さ。メートル単位の非負のスカラーとして指定します。 |
| 幅 (m) | プラットフォームの幅。メートル単位の非負のスカラーとして指定します。 |
| 高さ (m) | プラットフォームの高さ。メートル単位の非負のスカラーとして指定します。 |
[X]、[Y]、および [Z] オフセットを使用して [プラットフォーム中心のオフセット] を指定することもできます。オフセットは、プラットフォームの幾何学的中心から指定された中心までとして測定されます。
| パラメーター | 説明 |
|---|---|
| X (m) | x 方向のオフセット。メートル単位のスカラーとして指定します。 |
| Y (m) | y 方向のオフセット。メートル単位のスカラーとして指定します。 |
| Z (m) | z 方向のオフセット。メートル単位のスカラーとして指定します。 |
プラットフォームの初期位置と方向。メートル単位の 3 つの位置座標 [X]、[Y]、および [高度] と、度単位の 3 つの回転角度 [ロール]、[ピッチ]、および [ヨー] によって指定します。
| パラメーター | 説明 |
|---|---|
| X (m) | シナリオの座標系におけるプラットフォーム中心の初期 x 座標。メートル単位のスカラーとして指定します。 |
| Y (m) | シナリオの座標系におけるプラットフォーム中心の初期 y 座標。メートル単位のスカラーとして指定します。 |
| 高度 (m) | シナリオの座標系におけるプラットフォーム中心の初期高度。メートル単位のスカラーとして指定します。 |
| ロール (°) | シナリオの座標系の x 軸を基準としたプラットフォームの方向角度。度単位のスカラーとして指定します。 |
| ピッチ (°) | シナリオの座標系の y 軸を基準としたプラットフォームの方向角度。度単位のスカラーとして指定します。 |
| ヨー (°) | シナリオの座標系の z 軸を基準としたプラットフォームの方向角度。度単位のスカラーとして指定します。 |
プラットフォームの姿勢推定の精度。3 つの回転角度 [ロール]、[ピッチ]、および [ヨー] と、2 つの並進運動量 [位置] および [速度] の標準偏差として指定します。
いずれかの運動量の標準偏差値が非ゼロとして指定されている場合、プラットフォームの姿勢にはその運動量に対応する誤差が含まれます。
| パラメーター | 説明 |
|---|---|
| ロール (°) | プラットフォームのロール角の標準偏差。度単位のスカラーとして指定します。 |
| ピッチ (°) | プラットフォームのピッチ角の標準偏差。度単位のスカラーとして指定します。 |
| ヨー (°) | プラットフォームのヨー角の標準偏差。度単位のスカラーとして指定します。 |
| 位置 (m) | プラットフォームの位置座標の標準偏差。メートル単位のスカラーとして指定します。 |
| 速度 (m/s) | プラットフォームの速度座標の標準偏差。メートル/秒単位のスカラーとして指定します。 |
RCS パターン情報と RCS ビューアー仕様を含むレーダー断面積情報。一定の RCS パターンを dBsm 単位のスカラーとして指定するか、[RCS のインポート] タブを選択した後に [シグネチャのインポート] ウィンドウから RCS 情報をインポートできます。
| パラメーター | 説明 |
|---|---|
| 一定の RCS パターン | RCS パターン。dBsm 単位の正の定数として指定します。 |
| RCS のインポート | [シグネチャのインポート] ウィンドウから RCS パターンをインポートします。 |
また、[切断仰角] を度単位で、[切断周波数] を Hz 単位で変更することで [RCS ビューアー] を指定することもできます。
| パラメーター | 説明 |
|---|---|
| 切断仰角 | RCS ビューアーの切断仰角。度単位のスカラーとして指定します。 |
| 切断周波数 | RCS ビューアーの切断周波数。Hz 単位のスカラーとして指定します。 |
[センサー プロパティ] パラメーターを有効にするには、少なくとも 1 つのセンサーをプラットフォームに追加します。次に、[センサー キャンバス] または [センサー プロパティ] タブからセンサーを選択します。[センサー プロパティ] タブのパラメーター値は、選択したプラットフォームとセンサーに基づきます。
| パラメーター | 説明 |
|---|---|
| 現在のプラットフォーム | センサーが取り付けられている現在のプラットフォーム。シナリオ内のプラットフォームのリストとして指定します。 |
| 現在のセンサー | 現在選択されているセンサー。シナリオ内のセンサーのリストとして指定します。 |
| 名前 | センサーの名前。string として指定します。 |
| 更新頻度 | センサーの更新頻度。正のスカラー (Hz 単位) として指定します。 |
| タイプ | センサーのタイプ。以下として指定します。
|
プラットフォーム上のセンサーの取り付け位置と角度。メートル単位の 3 つの位置座標 [X]、[Y]、および [Z] と、度単位の 3 つの回転角度 [ロール]、[ピッチ]、および [ヨー] によって指定します。
| パラメーター | 説明 |
|---|---|
| X (m) | プラットフォームの座標系におけるセンサーの x 座標。メートル単位のスカラーとして指定します。 |
| Y (m) | プラットフォームの座標系におけるセンサーの y 座標。メートル単位のスカラーとして指定します。 |
| Z (m) | プラットフォームの座標系におけるセンサーの z 座標。メートル単位のスカラーとして指定します。 |
| ロール (°) | プラットフォームの座標系の x 軸を基準としたセンサーの方向角度。度単位のスカラーとして指定します。 |
| ピッチ (°) | プラットフォームの座標系の y 軸を基準としたセンサーの方向角度。度単位のスカラーとして指定します。 |
| ヨー (°) | プラットフォームの座標系の z 軸を基準としたセンサーの方向角度。度単位のスカラーとして指定します。 |
| パラメーター | 説明 |
|---|---|
| 仰角のレポート | センサーによる仰角情報のレポートを有効にするかどうか。 |
| スキャン モード | センサーのスキャンのモード。 |
| 視野 (°) | センサーの視野。度単位で [方位角] と [仰角] を表す 2 つの非負のスカラーとして指定します。 |
| 機械的スキャン範囲 (°) | 機械的スキャンの上限と下限。[方位角] の度単位の 2 つのスカラーとして指定します。[仰角のレポート] が有効になっている場合は、[仰角] の度単位のスキャン範囲を指定できます。 このパラメーターを有効にするには、[スキャン モード] を |
| 電子的スキャン範囲 (°) | 電子的スキャンの上限と下限。[方位角] の度単位の 2 つのスカラーとして指定します。[仰角のレポート] が有効になっている場合は、[仰角] の度単位のスキャン範囲を指定できます。 このパラメーターを有効にするには、[スキャン モード] を |
| 最大スキャン レート (°/s) | 最大スキャン レート。[方位角] の 1 秒あたりの度単位のスカラーとして指定します。[仰角のレポート] が有効になっている場合は、[仰角] の最大スキャン レートを 1 秒あたりの度単位で指定できます。 指定されたスキャン レート ([更新頻度] * [視野]) が [最大スキャン レート] より大きい場合、センサーのスキャン レートは [最大スキャン レート] に切り捨てられます。 このパラメーターを有効にするには、[スキャン モード] を |
センサーの検出設定。検出確率、偽警報率、参照レンジ、および参照 RCS を使用して指定します。
| パラメーター | 説明 |
|---|---|
| 検出確率 | センサーがターゲットを正常に検出する確率。[0,1] のスカラーとして指定します。この数量は、レーダー断面積が [参照 RCS] より大きく、センサーの [参照レンジ] 内にあるターゲットを検出する確率を定義します。 |
| 偽警報率 | センサーが各センサー分解能セルで誤検出を行う確率。[1e-7,1e-3] のスカラーとして指定します。 |
| 参照レンジ (m) | 指定された [検出確率] および指定された [参照 RCS] の参照レンジ。メートル単位の正のスカラーとして指定します。 |
| 参照 RCS (dBsm) | 指定された [検出確率] および指定された [参照レンジ] の参照レーダー断面積 (RCS)。dBsm 単位のスカラーとして指定します。 |
次の表にセンサーの詳細設定をリストします。
| パラメーター | 説明 |
|---|---|
| 最大検出数 | センサーによってレポートされる最大検出数。正の整数として指定します。 |
| 偽警報のレポート | センサーによる偽警報のモデル化およびレポートを有効にするかどうか。 |
| レンジ レートのレポート | レーダーによるターゲット レンジ レートの測定およびレポートを有効にするかどうか。 |
| ターゲット オクルージョンのモデル化 | 拡張オブジェクトからのオブジェクトのオクルージョンを有効にするかどうか。 |
| レンジの不明瞭さをモデル化 | レンジの不明瞭さを有効にするかどうか。 |
| レンジ レートの不明瞭さをモデル化 | レンジ レートの不明瞭さを有効にするかどうか。 このパラメーターを有効にするには、[レンジ レートのレポート] を |
| 最大明瞭レンジ (m) | 最大明瞭レンジ。正のスカラーとして指定します。最大明瞭レンジは、レーダーがターゲットのレンジを明瞭に解決できる最大レンジを定義します。 |
| 明瞭な最大半径方向速度 (m/s) | 明瞭な最大半径方向速度。正のスカラーとして指定します。半径方向速度は、ターゲット レンジ レートの大きさです。明瞭な最大半径方向速度は、レーダーがターゲットのレンジ レートを明瞭に解決できる半径方向速度を定義します。 このパラメーターを有効にするには、[レンジ レートのレポート] を |
次の表にセンサーの精度およびノイズの設定をリストします。
| パラメーター | 説明 |
|---|---|
| 方位角 (°) | 方位角の分解能およびバイアス。2 つの非負のスカラーとして指定します。
|
| 仰角 (°) | 仰角の分解能およびバイアス。2 つの非負のスカラーとして指定します。
このパラメーターを有効にするには、[仰角のレポート] をオンにします。 |
| レンジ (m) | レンジの分解能およびバイアス。2 つの非負のスカラーとして指定します。
|
| レンジ レート (m/s) | レンジ レートの分解能およびバイアス。2 つの非負のスカラーとして指定します。
|
| 測定にノイズを追加 | 検出で測定ノイズを追加するかどうか。 |
軌跡を編集し、軌跡の生成を制御するには、軌跡設定を使用します。

選択したプラットフォームにウェイポイントを追加するには、[ウェイポイント] をクリックします。
既存の軌跡を削除するには、[軌跡の削除] をクリックします。
軌跡テーブルを表示するには、[軌跡テーブル] をクリックします。
時間-高度プロットを表示するには、[時間-高度プロット] をクリックします。
速度と加速度のプロファイルを表示するには、[速度と加速度] をクリックします。表示には次の 5 つのプロットがあります。
対地速度 — シナリオの座標系の x-y 平面に投影されたプラットフォーム速度の大きさ。
昇降速度 — シナリオの座標系における鉛直上向き方向のプラットフォーム速度の投影。
プラットフォーム X の加速度 — プラットフォームのボディ座標系の x 軸へのプラットフォームの加速度の投影。
プラットフォーム Y の加速度 — プラットフォームのボディ座標系の y 軸へのプラットフォームの加速度の投影。
プラットフォーム Z の加速度 — プラットフォームのボディ座標系の z 軸へのプラットフォームの加速度の投影。
これらのプロットの詳細については、トラッキング シナリオ デザイナーにおけるプラットフォームの軌跡の設定を参照してください。
また、[パスと方向] および [速度] パラメーターの選択を変更することで、ウェイポイントの軌跡を自動的に生成するか、手動でウェイポイントを入力するかを選択することもできます。
| パラメーター | 選択 |
|---|---|
| 軌跡コース |
|
| プラットフォームの向き |
|
| 時間 |
|
| 対地速度 |
|
| 昇降速度 |
|
| 加加速度の範囲 |
|
各ウェイポイントにおける軌跡情報。スカラーの table として指定します。プラットフォーム キャンバスにウェイポイントを挿入すると、テーブルが自動的に生成されます。[軌跡] タブの [軌跡テーブル] をクリックしてテーブルを表示します。

テーブル内のパラメーター値を変更すると、それに応じてキャンバス上のプラットフォームの軌跡が変更されます。テーブルには次の軌跡パラメーターが含まれています。
| パラメーター | 説明 |
|---|---|
| 時間 (s) | プラットフォームがウェイポイントに到達する時間。秒単位のスカラーとして指定します。 |
| X (m) | シナリオのナビゲーション座標系におけるウェイポイントの x 座標。 |
| Y (m) | シナリオのナビゲーション座標系におけるウェイポイントの y 座標。 |
| 高度 (m) | シナリオのナビゲーション座標系におけるプラットフォーム ウェイポイントの高度。 |
| コース (°) | x-y 平面における運動方向。x 方向からの角度の測定値として指定します。 |
| 対地速度 (m/s) | x-y 平面における投影速度の大きさ。メートル単位のスカラーとして指定します。 |
| 昇降速度 (m/s) | ウェイポイントの昇降速度。これは、z 方向へのプラットフォーム速度の投影です。 |
| ロール (°) | シナリオの座標系の x 軸を基準としたプラットフォームの方向角度 (度単位)。スカラーとして指定します。 |
| ピッチ (°) | シナリオの座標系の y 軸を基準としたプラットフォームの方向角度 (度単位)。スカラーとして指定します。 |
| ヨー (°) | シナリオの座標系の z 軸を基準としたプラットフォームの方向角度 (度単位)。スカラーとして指定します。 |
プログラムでの使用
ヒント
アプリは既定の座標系として NED 座標系を使用します。この座標系では、正の高度をもつプラットフォームは負の z 座標をもちます。
シナリオ キャンバスとセンサー キャンバスで行った変更は、元に戻したり (Ctrl+Z を押す)、やり直したりする (Ctrl+Y を押す) ことができます。たとえば、これらのキーボード ショートカットを使用して、最近配置した道路の中心を削除したり、レーダー センサーの移動をやり直したりできます。
キーボードのスペース バーを使用して、プラットフォーム キャンバスを、すべてのプラットフォームと軌跡を含むビューにリセットできます。
キーボードの Enter キーと Esc キーを使用して、それぞれウェイポイントを受け入れおよびキャンセルできます。