空域トラッキング
これらの例では、航空交通管制や一般的なレーダー監視のために空域内のターゲットをトラックします。
注目の例
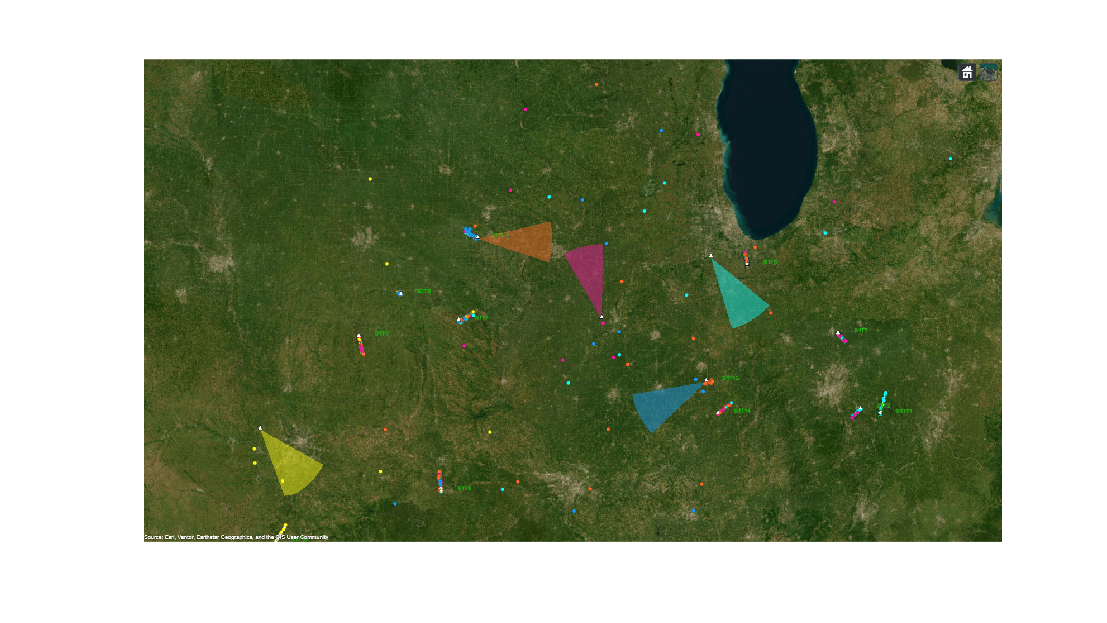
Low-Altitude Target Tracking with Terrain-Aware Multi-Radar Fusion
Demonstrates how to track targets in a mountainous region, where the terrain can obscure low-flying targets from surveillance sensors. You will learn how to configure and run a Joint Probabilistic Data Association (JPDA) tracker to monitor these targets using multiple radar systems. Additionally, you will explore how incorporating terrain information from a Digital Terrain Elevation Data (DTED) file can enhance tracking performance in such challenging environments.
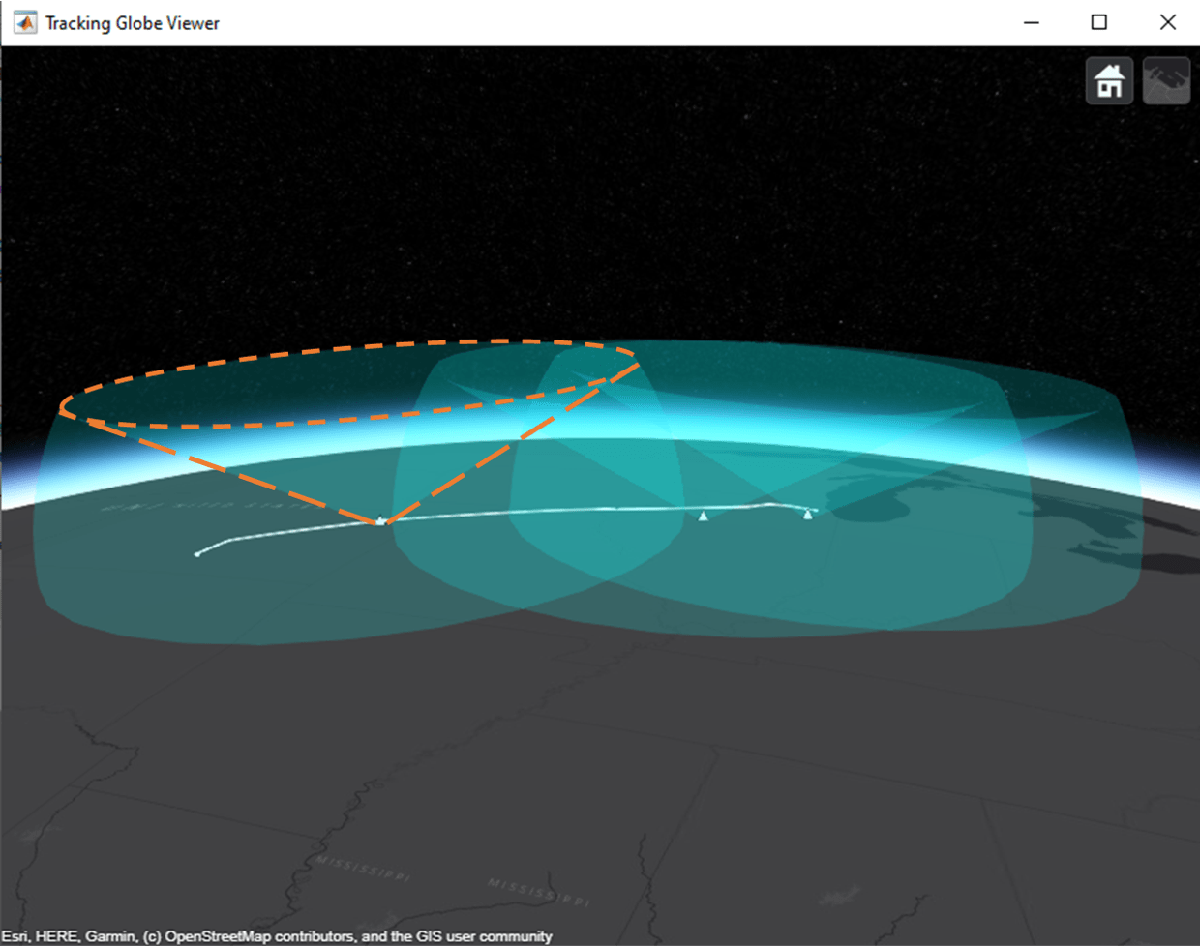
Wide Area Surveillance Using Ground and Airborne Radars
Track aircraft in an airspace using a multiplatform radar network consisting of both ground-based and airborne radars. In this example, you configure and run a Joint Integrated Probabilistic Data Association (JIPDA) tracker for wide area surveillance using recorded radar data.

Track Targets Using Asynchronous Bistatic Radars
Builds upon the Tracking Using Bistatic Range Detections example and shows how to configure a multi-sensor multi-target tracker to track targets using asynchronous bistatic radars that report range and angles. Bistatic sensors are advantageous because the emitter part and the receiver part of the sensor are not collocated, which makes the receivers less detectable. Additionally, they allows many receivers to work with a single emitter. Therefore, bistatic sensors are becoming more common in various applications where it is beneficial to hide the receivers or reduce the amount of energy they consume.

Use Truth Analysis to Track Maneuvering Targets
In this example, you will learn how to specify a tracker target specification for a maneuvering aircraft based on knowledge gained from analyzing recorded truth. You will then use this tracker target specification to define a multi-object tracker.

Cooperative Bistatic Radar I/Q Simulation and Processing
Simulate I/Q for a cooperative bistatic system and perform subsequent signal processing for a single bistatic transmitter and receiver pair.
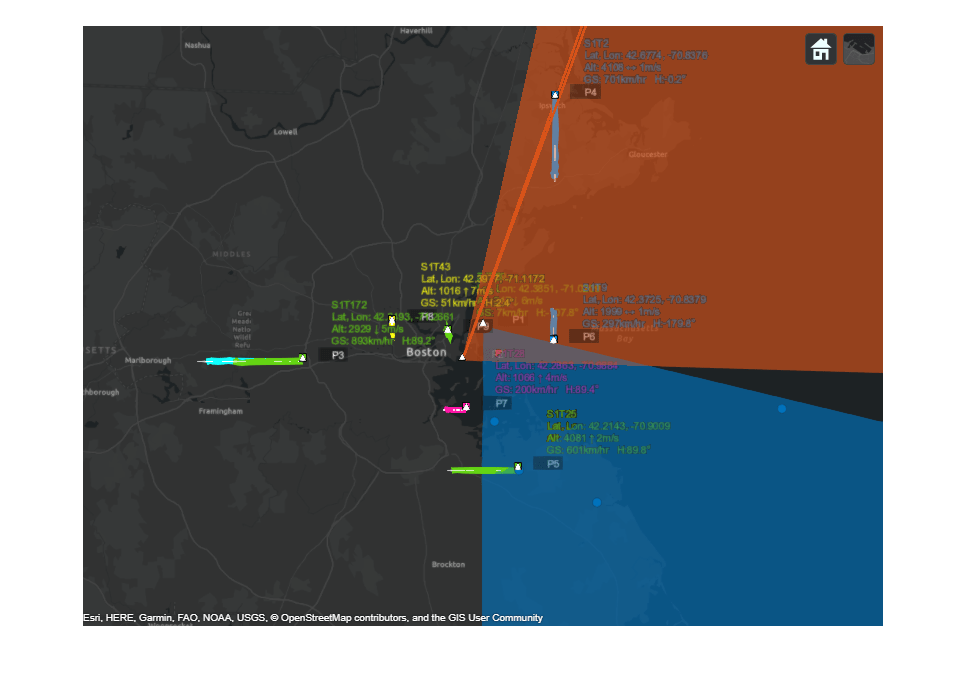
Track Heterogeneous Aircraft Using Heterogeneous Sensors
Track heterogeneous aircraft using data collected by heterogeneous sensors. In the example, you track commercial passenger aircraft, general aviation aircraft, and helicopters flying in the airspace near the Logan International Airport in Boston, MA. You use active and passive radars and their outputs to track the aircraft using a JIPDATracker.
Air Traffic Control
Generate an air traffic control scenario, simulate radar detections from an airport surveillance radar (ASR), and configure a global nearest neighbor (GNN) tracker to track the simulated targets using the radar detections. This enables you to evaluate different target scenarios, radar requirements, and tracker configurations without needing access to costly aircraft or equipment. This example covers the entire synthetic data workflow.
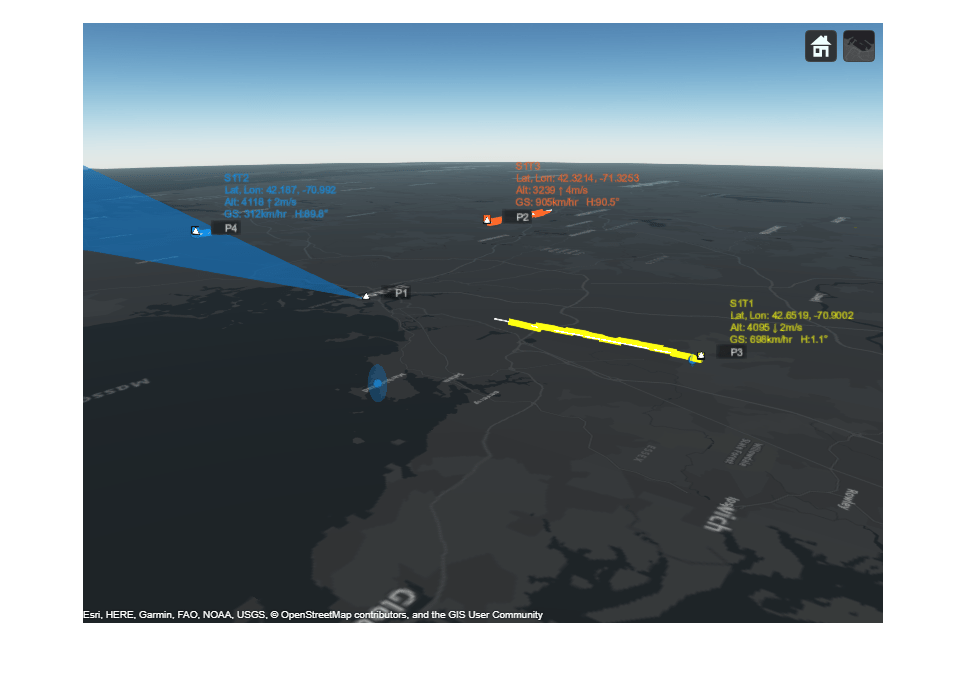
Simulate and Track En-Route Aircraft in Earth-Centered Scenarios
Use an Earth-Centered trackingScenario and a geoTrajectory object to model a flight trajectory that spans thousands of kilometers. You use two different models to generate synthetic detections of the airplane: a monostatic radar and ADS-B reports. You use a multi-object tracker to estimate the plane trajectory, compare the tracking performance, and explore the impact that ADS-B provides on the overall tracking quality.

Simulate, Detect, and Track Anomalies in a Landing Approach
The example shows how to automatically detect deviations and anomalies in aircraft making final approaches to an airport runway. In this example, you will model an ideal landing approach trajectory and generate variants from it, simulate radar tracks, and issue warnings as soon as the tracks deviate from safe landing rules.
Multiplatform Radar Detection Fusion
Fuse radar detections from a multiplatform radar network. The network includes two airborne and one ground-based long-range radar platforms. See the Multiplatform Radar Detection Generation example for details. A central tracker processes the detections from all platforms at a fixed update interval. This enables you to evaluate the network's performance against target types, platform maneuvers, as well as platform configurations and locations..

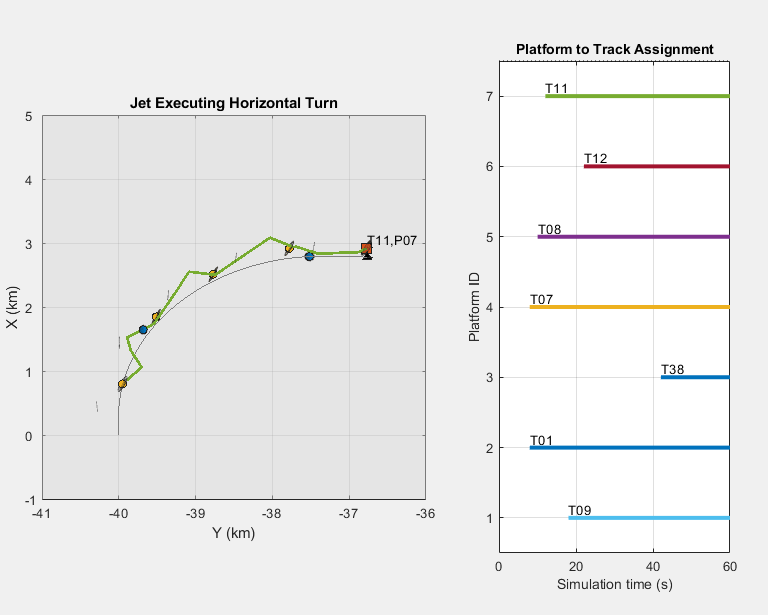
Adaptive Tracking of Maneuvering Targets with Managed Radar
Use radar resource management to efficiently track multiple maneuvering targets. Tracking maneuvering targets requires the radar to revisit the targets more frequently than tracking non-maneuvering targets. An interacting multiple model (IMM) filter estimates when the target is maneuvering. This estimate helps to manage the radar revisit time and therefore enhances the tracking. This example uses the Radar Toolbox™ for the radar model and Sensor Fusion and Tracking Toolbox™ for the tracking.

Air Traffic Control in Simulink
Create a tracking system for an air traffic control center using a global nearest neighbor (GNN) tracker in Simulink.