Stateflow チャートを使用した空燃比制御システム
Simulink® と Stateflow® を使用して設計された空燃比制御システムのコードを生成します。
図 1、2、3 は、プラントとコントローラーを含む閉ループ システムである sldemo_fuelsys モデルの関連部分を示しています。プラントでは、設計の初期段階でのシミュレーション時にコントローラーを検証します。この例では、関連するコントローラー サブシステム "fuel_rate_control" のコードを生成します。図 1 は、最上位のシミュレーション モデルを示しています。
sldemo_fuelsys モデルを開いて構成します。次に、モデルをコンパイルして信号のデータ型を確認します。
model = 'sldemo_fuelsys'; open_system(model) coder.example.configure(model,'ERT','float'); set_param(model,'ShowPortDataTypes','on'); set_param(model,'SampleTimeColors','on'); sldemo_fuelsys([],[],[],'compile'); sldemo_fuelsys([],[],[],'term');
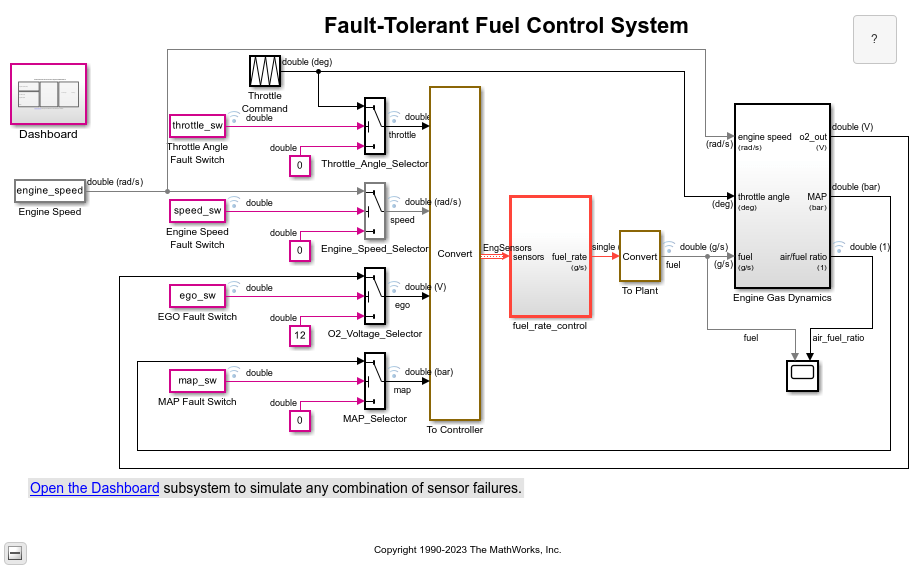
図 1: プラントとコントローラーの最上位モデル
空燃比制御システムは Simulink と Stateflow で構成されます。この制御システムはコードを生成するモデルの一部分です。
open_system('sldemo_fuelsys/fuel_rate_control');
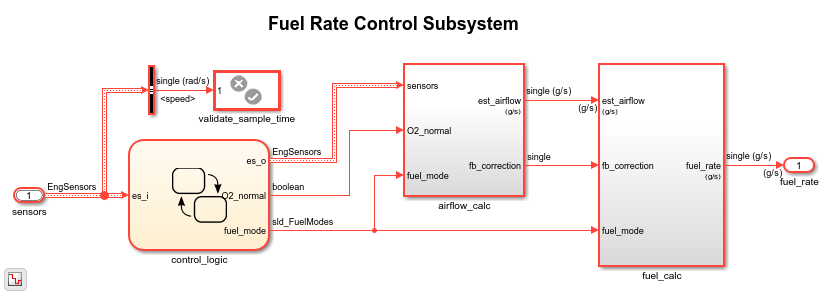
図 2: 空燃比コントローラー サブシステム
制御ロジックは、さまざまな動作モードを指定する Stateflow チャートです。
open_system('sldemo_fuelsys/fuel_rate_control/control_logic');
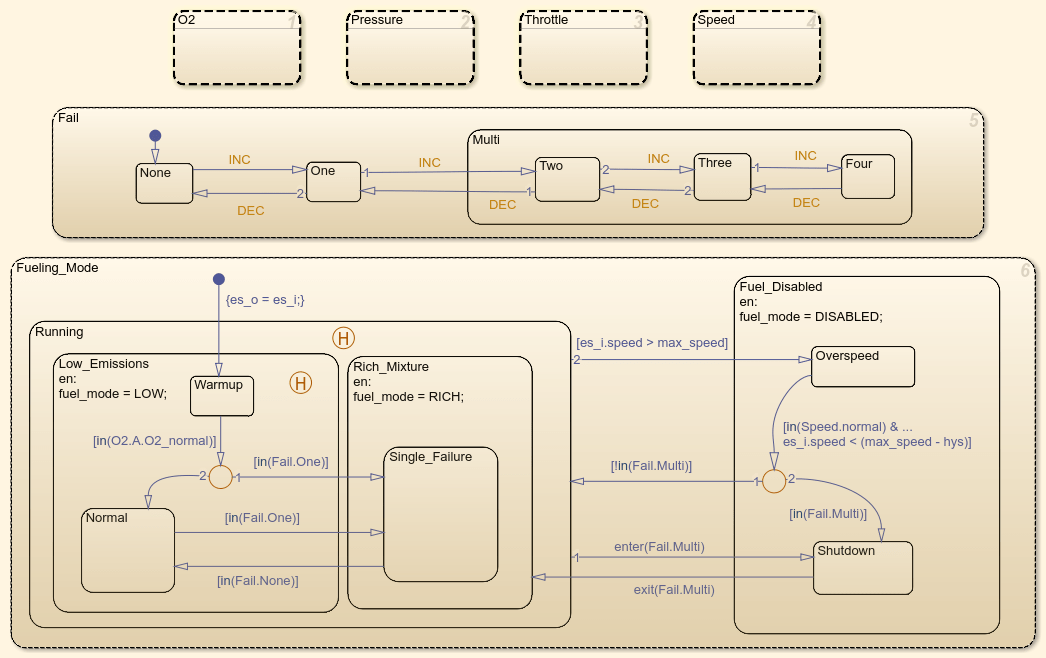
図 3: 空燃比コントローラーのロジック
これらのウィンドウを閉じます。
close_system('sldemo_fuelsys/fuel_rate_control/airflow_calc'); close_system('sldemo_fuelsys/fuel_rate_control/fuel_calc'); close_system('sldemo_fuelsys/fuel_rate_control/control_logic'); hDemo.rt=sfroot;hDemo.m=hDemo.rt.find('-isa','Simulink.BlockDiagram'); hDemo.c=hDemo.m.find('-isa','Stateflow.Chart','-and','Name','control_logic'); hDemo.c.visible=false; close_system('sldemo_fuelsys/fuel_rate_control');
Embedded Coder によるモデルの構成とビルド
量産 ANSI® C/C++ コードをモデル用に設定してビルドするには、モデル コンフィギュレーション パラメーター [システム ターゲット ファイル] を ert.tlc (組み込みリアルタイム (ERT)) に設定します。[システム ターゲット ファイル] パラメーターをプログラムにより設定できます。
coder.example.configure('sldemo_fuelsys','ERT');
コードを生成して検査します。関連するコード セグメントには [前へ] ボタンと [次へ] ボタンを使用して対話形式で移動できます。チャートのコンテキスト メニュー (Stateflow ブロックを右クリック) で、[C/C++ コード]、[C/C++ コードに移動] を選択します。プログラムで実行する場合は、rtwtrace ユーティリティを使用します。
slbuild('sldemo_fuelsys/fuel_rate_control'); rtwtrace('sldemo_fuelsys/fuel_rate_control/control_logic')
### Searching for referenced models in model 'fuel_rate_control'. ### Total of 1 models to build. ### Starting build procedure for: fuel_rate_control ### Successful completion of build procedure for: fuel_rate_control Build Summary Top model targets: Model Build Reason Status Build Duration ==================================================================================================================== fuel_rate_control Information cache folder or artifacts were missing. Code generated and compiled. 0h 0m 11.301s 1 of 1 models built (0 models already up to date) Build duration: 0h 0m 11.683s
生成されたコードで空燃比制御ロジックを確認します。
coder.example.extractLines('fuel_rate_control_ert_rtw/fuel_rate_control.c',... '/* Function for Chart:','case IN_Warmup:',1,0);
/* Function for Chart: '<S1>/control_logic' */
static void Fueling_Mode(const int32_T *sfEvent)
{
switch (rtDWork.bitsForTID0.is_Fueling_Mode) {
case IN_Fuel_Disabled:
rtDWork.fuel_mode = DISABLED;
switch (rtDWork.bitsForTID0.is_Fuel_Disabled) {
case IN_Overspeed:
/* Inport: '<Root>/sensors' */
if ((rtDWork.bitsForTID0.is_Speed == IN_normal) && (rtU.sensors.speed <
603.0F)) {
if (rtDWork.bitsForTID0.is_Fail != IN_Multi) {
rtDWork.bitsForTID0.is_Fuel_Disabled = IN_NO_ACTIVE_CHILD;
rtDWork.bitsForTID0.is_Fueling_Mode = IN_Running;
/* The fuel is actively controlled while in this state. */
switch (rtDWork.bitsForTID0.was_Running) {
case IN_Low_Emissions:
rtDWork.bitsForTID0.is_Running = IN_Low_Emissions;
rtDWork.bitsForTID0.was_Running = IN_Low_Emissions;
rtDWork.fuel_mode = LOW;
switch (rtDWork.bitsForTID0.was_Low_Emissions) {
case IN_Normal:
rtDWork.bitsForTID0.is_Low_Emissions = IN_Normal;
rtDWork.bitsForTID0.was_Low_Emissions = IN_Normal;
/* All sensors are in correct operating modes, so effective closed-loop mixture control can be used. */
break;
モデルおよびコード生成レポートを閉じます。
clear hDemo; close_system('sldemo_fuelsys',0);