低次元化モデリング
低次元化モデリング タスクに Deep Learning Toolbox™ を使用します。
"低次元化モデリング" は、モデルの忠実度を許容範囲内の誤差で維持しながら、モデルの計算量やストレージ要件を削減する手法です。低次元化されたモデルを使用すると、制御の設計と解析が簡素化されます。たとえば Simulink® モデル内の計算量が多いサブシステムを、現実的な予測を行う学習済みニューラル ネットワークに置き換えることができます。
削減前の次元で高忠実度のサードパーティ シミュレーション モデルを含む、Simulink でモデル化されたサブシステムの低次元化モデル (ROM) を作成できます。既存の時間領域データを使用して ROM を作成することもできます。
Reduced Order Modeler アプリは、ROM を作成するための UI ワークフローを提供します。アプリを使用するには、アドオンの取得と管理の手順に従って、Reduced Order Modeler for MATLAB® サポート パッケージをインストールします。
アプリ
| Reduced Order Modeler | Create reduced order models based on Simulink models, subsystems within models, or simulation data (R2025b 以降) |
関数
exportNetworkToSimulink | Generate Simulink model that contains deep learning layer blocks and subsystems that correspond to deep learning layer objects (R2024b 以降) |
ブロック
| Predict | 学習済み深層学習ニューラル ネットワークを使用した応答の予測 |
| Stateful Predict | 学習済み再帰型ニューラル ネットワークを使用した応答の予測 |
トピック
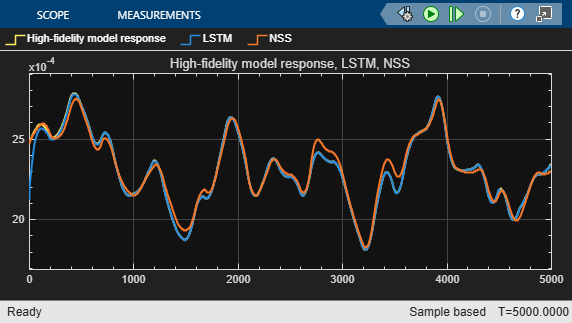
- Reduced Order Model of a Jet Engine Turbine Blade (System Identification Toolbox)
Create a ROM of a jet engine turbine blade, using the long short-term memory (LSTM) and NSS model types.
- Simulink における LSTM ネットワークを使用した物理システムのモデリング
この例では、長短期記憶 (LSTM) ニューラル ネットワークを使用して、Simulink® モデルでバーチャル センサーとして機能する低次元化モデル (ROM) を作成する方法を示します。
- Reduced Order Modeling Using Continuous-Time Echo State Network
This example shows how to train a continuous-time echo state network (CTESN) model to solve Robertson's equation.
- Generate Deep Learning SI Engine Model (Powertrain Blockset)
Generate a deep learning SI engine model from measured transient engine data.
- Implement Unsupported Deep Learning Layer Blocks
Learn how to implement unsupported deep learning layer blocks.
関連情報
- 低次元化モデリング (Simulink)
- 低次元化モデリング (System Identification Toolbox)
- MATLAB および Simulink による低次元化モデリング
注目の例
Reduced Order Model of a Jet Engine Turbine Blade
Create a ROM of a jet engine turbine blade, using the long short-term memory (LSTM) and NSS model types.

Reduced Order Modeling of Electric Vehicle Battery System Using Neural State-Space Model
A reduced order modeling (ROM) workflow, where you use deep learning to obtain a low-order nonlinear state-space model that serves as a surrogate for a high-fidelity battery model. The low-order model takes the current (charge or discharge) and state of charge (SOC) as inputs and predicts voltage and temperature of an electric vehicle (EV) battery module while the battery is being cooled by an edge-cooled plate with a coolant at a constant flow rate. You train the low-order model and deploy it in Simulink® to compare it against the high-fidelity model.