Create MATLAB Function That Detects Edges Using Inputs From NVIDIA Jetson
In this step, you create a Sobel edge detection algorithm that takes snapshots using the camera on an NVIDIA® Jetson™ board and detects edges in the snapshot. You connect to the Jetson board and webcam from MATLAB®. You create the algorithm that takes snapshots and detects edges and view the results.
Connect to NVIDIA Jetson
To connect to the Jetson board, create a jetson object. When connecting to the target board for the first time, provide the host name or IP address, user name, and password of the target board.
hwobj = jetson("jetson-deviceaddress","username","password");
If you call the jetson function without input arguments, MATLAB reuses the device address, username, and password from the last successful connection. MATLAB connects to the board and checks the status of the hardware.
hwObj = jetson;
### Checking for CUDA availability on the target... ### Checking for 'nvcc' in the target system path... ### Checking for cuDNN library availability on the target... ### Checking for TensorRT library availability on the target... ### Checking for prerequisite libraries is complete. ### Gathering hardware details... ### Checking for third-party library availability on the target... ### Gathering hardware details is complete. Board name : NVIDIA Jetson AGX Xavier Developer Kit CUDA Version : 11.4 cuDNN Version : 8.6 TensorRT Version : 8.5 GStreamer Version : 1.16.3 V4L2 Version : 1.18.0-2build1 SDL Version : 1.2 OpenCV Version : 4.5.4 Available Webcams : Microsoft LifeCam Cinema(TM): Available GPUs : Xavier Available Digital Pins : 7 11 12 13 15 16 18 19 21 22 23 24 26 29 31 32 33 35 36 37 38 40
Connect to Webcam Device
To access the peripherals of the board, you use the jetson object. To connect to a camera on the board, get the list of cameras on the hardware board, including their names and available resolutions. In this example, there is one camera connected to the board.
camList = hwObj.getCameraList;
Camera Name Video Device Available Resolutions Pixel Formats
_______________________________ _____________ _____________________ _____________
"Microsoft LifeCam Cinema(TM):" "/dev/video0" "(View resolutions)" "YUYV,MJPG"
Select the name of the camera to use. This code selects the first available camera.
cameraName = camList.("Camera Name")(1);Set the resolution on the camera. In this example, the camera uses a 1280-by-800 resolution.
camResolution = [1280 800];
To connect to the camera on the jetson board, create a camera object.
camObj = camera(hwObj,cameraName(1),camResolution);
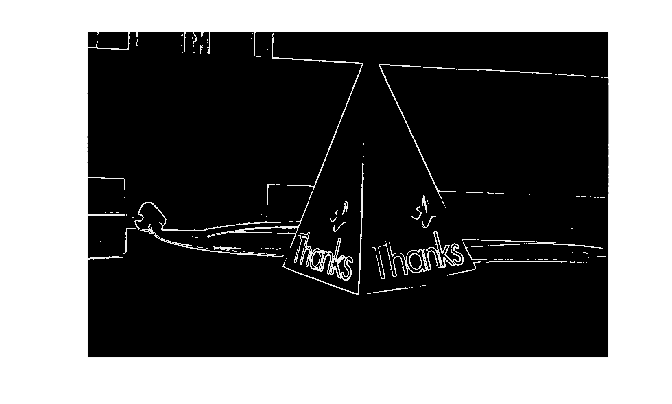
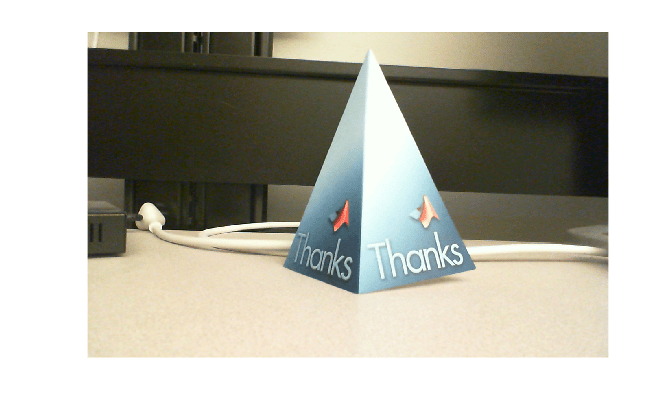
Use the camera object to take a snapshot on the camera and return it to MATLAB. Display the snapshot.
snapImage = snapshot(camObj); imshow(snapImage)
Examine the Sobel Edge Detection Algorithm
The Sobel edge detection algorithm contained in sobelEdgeDetectionAlg.m is a 2-D spatial gradient operation on a grayscale image. The algorithm emphasizes the high spatial frequency regions of the image, which correspond to edges.
type sobelEdgeDetectionAlg.mfunction edgeImg = sobelEdgeDetectionAlg(img,thresh) %sobelEdgeDetection Example MATLAB function for edge detection. % Copyright 2018 The MathWorks, Inc. kern = half([1 2 1; 0 0 0; -1 -2 -1]); % Finding horizontal and vertical gradients. h = conv2(img(:,:,2),kern,'same'); v = conv2(img(:,:,2),kern','same'); % Finding magnitude of the gradients. e = sqrt(h.*h + v.*v); % Threshold the edges edgeImg = uint8((e > thresh) * 240); end
To examine the algorithm, test the algorithm on a sample image, peppers.png. First, display the unedited image.
img = imread("peppers.png");
imshow(img);
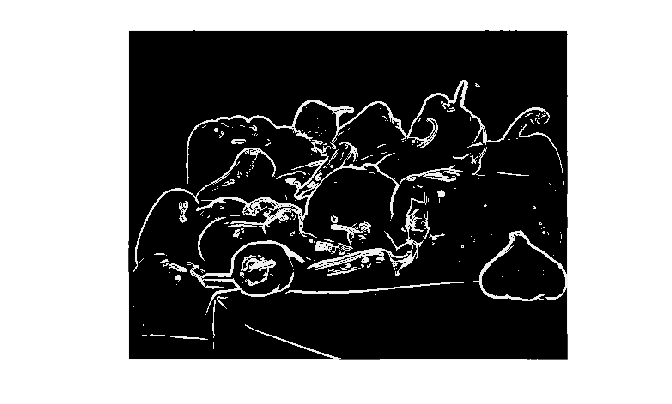
Run the algorithm on the image with a threshold value of 100. Display the edge-detected image.
edgeImg = sobelEdgeDetectionAlg(img,100); imshow(edgeImg);
Create Algorithm That Uses Data from Jetson
To create an algorithm that takes a snapshot from the Jetson and detects edges, edit the function so that it connects to the Jetson hardware and camera. To connect to a specified camera, make the camera name and resolution arguments to the function. For example, insert this code at the top of sobelEdgeDetectionAlg.m to declare the function, connect to the hardware board, and connect to the webcam.
function sobelEdgeDetection_init(cameraName,resolution)
hwObj = jetson;
camObj = camera(hwObj,cameraName,resolution);
Replace the thresh variable with a constant value of 100. Save the function as sobelEdgeDetection_init.m.
type sobelEdgeDetection_init.mfunction sobelEdgeDetection_init(cameraName,resolution) hwObj = jetson; camObj = camera(hwObj,cameraName,resolution); % Sobel kernel kern = [1 2 1; 0 0 0; -1 -2 -1]; % Capture the image from the camera on hardware. img = snapshot(camObj); % Finding horizontal and vertical gradients. h = conv2(img(:,:,2),kern,'same'); v = conv2(img(:,:,2),kern','same'); % Finding magnitude of the gradients. e = sqrt(h.*h + v.*v); % Threshold the edges edgeImg = uint8((e > 100) * 240); % Display image. imshow(edgeImg) end
Clear the hardware connection objects and webcam objects before running the sobelEdgeDetection_init function.
clear hwObj camObj;
Run the sobelEdgeDetection_init function. The function creates a new connection to the hardware, takes a snapshot, and displays the edge-detected result.
sobelEdgeDetection_init(cameraName,camResolution);