このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
衛星シナリオの重要な概念
Aerospace Toolbox satelliteScenario (Satellite Communications Toolbox) オブジェクトを使用すると、軌道上の衛星をモデル化して可視化し、地上局へのアクセスを計算し、通信リンクを可視化して解析することができます。このトピックでは、シナリオの視覚化で頻繁に使用される技術用語について説明します。
Mapping Toolbox™ 3-D Coordinate and Vector Transfomations を使用すると、座標とベクトル成分をグローバル システムとローカル システム間で変換できます。
座標系
測地経緯度
測地系では、座標 (緯度、経度、h) を使用して、基準楕円体に対する相対的な位置を表します。衛星シナリオのすべての測地経緯度では、参照楕円体として 1984 年のWorld Geodetic System(WGS 84) が使用されます。WGS 84 の座標原点は地球の質量の中心にあります。
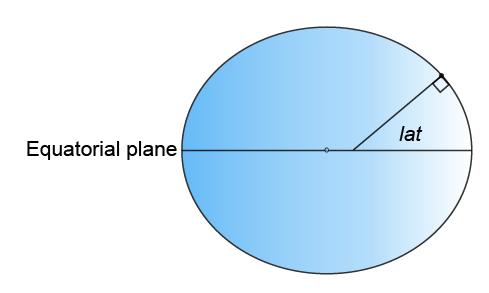
lat は、赤道を起点とする緯度です。より具体的には、ある点の緯度は、その点における楕円体の法線と、楕円体の中心と赤道を含む赤道面とのなす角度です。緯度角は[-90°、90°]の範囲です。正の緯度は北に対応し、負の緯度は南に対応します。
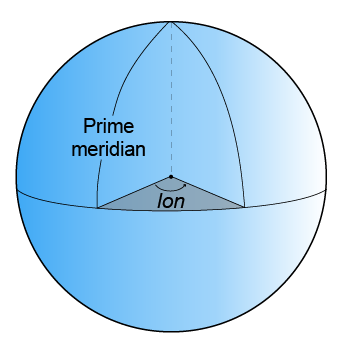
lon は本初子午線を起点とする経度です。より具体的には、ある点の経度は、楕円体の中心とその点を含む子午線を含む平面と、楕円体の中心と本初子午線を含む平面がなす角度です。正の経度は、北極の上の有利な地点から反時計回りの方向に測定されます。通常、経度は [–180°, 180°] または [0°, 360°] の範囲になります。
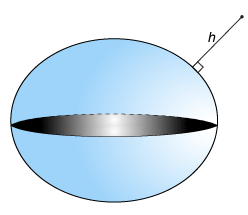
h は楕円体の高さであり、基準回転楕円体の法線に沿って測定されます。
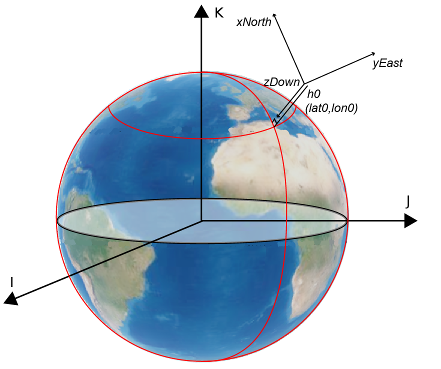
地球中心の地球固定座標
地球中心の地球固定(ECEF) システム では、直交座標 (X、Y、Z) を使用して、参照楕円体の中心に対する相対的な位置を表します。楕円体の中心と地球の中心の間の距離は、基準となる楕円体によって決まります。衛星シナリオでは、地球の質量の中心と一致する中心を持つ WGS 84 参照楕円体を使用します。
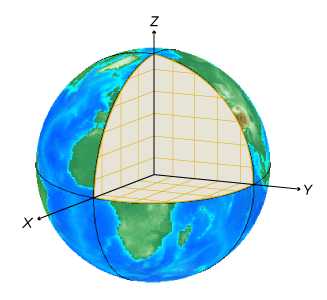
正の X 軸は、赤道が本初子午線と交わる緯度 0°、経度 0° で楕円体の表面と交差します。
正の Y 軸は、緯度 0°、経度 90° で楕円体の表面と交差します。
正の Z 軸は、緯度 90° で楕円体の表面と交差します。
メモ
境界の配置と地域ラベルはデータ ベンダーが提供する機能による表現であり、MathWorks® の承認を意味するものではありません。
参照フレームと北東下(NED)フレーム
空間内の点を記述するには、星に対して回転しない参照フレームが必要です。地球の中心に原点があり、直交ベクトル I、J、K を持つ 地球中心天体基準座標系 (GCRF) は、Satellite オブジェクトを satelliteScenario オブジェクトに追加するときの基準座標系として使用されます。基本平面は IJ 平面で、地球の自転軸の歳差運動と章動により時間の経過とともに変化する小さなオフセットを伴って赤道とほぼ一直線になっています。軌道要素を使用して衛星シナリオに衛星を追加する場合、座標は地球中心の天体基準座標系で定義されているものとみなされます。
位置、速度、加速度、方向、角速度について言及する場合、これらの量が表現される座標系について言及する必要があります。GCRF や測地システムなどのグローバル システムは、3 つの座標を使用してオブジェクトの位置を記述します。NED や 方位角仰角範囲 (AER) システムなどのローカル システムでは、2 つの座標トリプレットが必要です。1 つのトリプレットは原点の位置を記述し、もう 1 つのトリプレットは原点に対するオブジェクトの位置を記述します。
NED システムでは、直交座標 (xNorth、yEast、zDown) を使用して、ローカル原点に対する相対的な位置を表します。ローカル原点は測地経緯度(lat0、lon0、h0) で表されます。通常、NED システムの局所的な起源は地球の表面より上にあります。
正の xNorth 軸は、lon0 を含む経度の子午線に沿って北を指します。
正の yEast 軸は、lat0 を含む緯度に沿って東を指します。
正の zDown 軸は、楕円体の法線に沿って下を指します。
NED 座標系は、移動する衛星に対する相対的な位置を指定するためによく使用されます。この場合、座標は衛星のフレームに固定されるのではなく、衛星の緯度と経度に対応する WGS 84 楕円体の表面上の点に固定されます。
ロール、ピッチ、ヨー
3 本の線が衛星を通り、衛星の重心で直角に交差します。これらの軸は衛星に対して固定されており、NED フレームに対する衛星の向きを定義するために使用されます。方向は次の順序で回転によって定義されます。
ヨー角によるヨー軸を中心とした回転
ピッチ 軸を中心にピッチ角だけ回転
ロール 軸を中心としたロール角度による回転
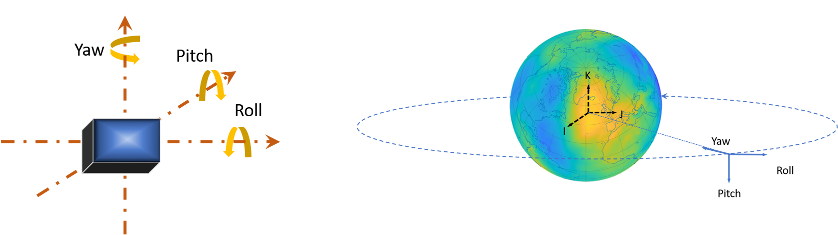
衛星のヨー、ピッチ、ロール角は、国際標準化機構 (ISO) の規則に従います。これらの角度は、軸の正の方向から見ると時計回りに正の方向を持ちます。特に指定がない限り、Aerospace Toolbox はこれらの角度に対してデフォルトでヨー-ピッチ-ロール (Z-Y-X) 回転順序を使用します。
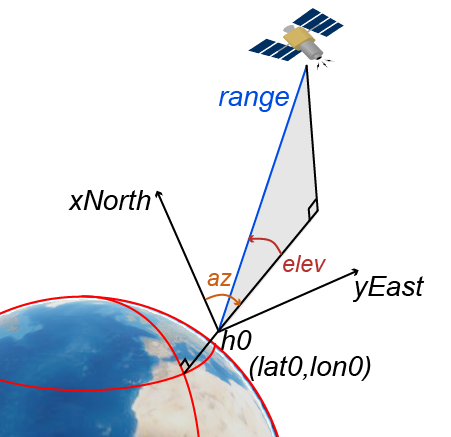
方位角・仰角・距離(AER)座標
AER システムは、球面座標 (az、elev、 範囲) を使用して、ローカル原点に対する相対的な位置を表します。ローカル原点は測地経緯度(lat0、lon0、h0) で表されます。方位角、仰角、および斜距離は、衛星の質量の中心を原点とするローカル直交座標系 (たとえば、NED システム) に依存します。
az は方位角で、(xNorth)(yEast) 平面内での、正の xNorth 軸から物体を平面に投影した点までの時計回りの角度です。
elev は仰角で、(xNorth)(yEast) 平面からオブジェクトまでの角度です。
範囲 は斜距離であり、オブジェクトとローカル原点間のユークリッド距離です。
軌道要素
軌道要素は、特定の軌道を一意に識別するために必要なパラメーターです。衛星軌道と衛星軌道内の衛星の位置を一意に定義するには、少なくとも 6 つのパラメーターが必要です。3 つのパラメーターは、軌道面の様子と楕円内の衛星の位置を表します。他の 3 つのパラメータは、その平面が天体の慣性基準座標系内でどのように向いているか、およびその平面内での衛星の位置を示します。これら 6 つのパラメーターは、ケプラー要素 または 軌道要素 と呼ばれます。
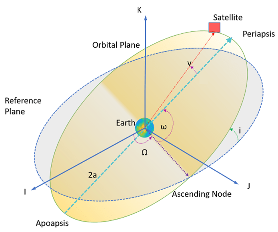
この図では、軌道面 (黄色) が 基準面 (灰色) と交差しています。地球を周回する衛星の場合、基準面は通常、GCRF の IJ 面です。
次の 2 つの要素は楕円の形状とサイズを定義します。
離心率(e) — 円と比較した場合、楕円の形状がどの程度細長いかを説明します。
長半径 (a) — 近点距離と遠点距離の合計を2で割った値。近点とは、軌道を回る物体が、周回する天体の質量の中心に最も近づく点です。遠点とは、軌道を回る物体が、周回する天体の重心から最も遠い点です。典型的な二体軌道の場合、軌道長半径は天体の中心間の距離です。
これら 2 つの要素は、楕円が埋め込まれる軌道面の方向を定義します。
傾斜角(i) — 昇交点で測定された基準面に対する楕円の垂直傾き。昇交点とは、軌道が基準面を上向きに通過する場所です (図の緑色の角度 i)。傾斜角は、軌道面と基準面の交線に対して垂直に測定されます。楕円上の任意の 3 つの点は、楕円軌道面を定義します。
赤道軌道から始まり、軌道面を上方に傾けることができます。赤道から上方に傾いている角度は、傾斜角角、i と呼ばれ、[0,180] の範囲になります。地球の中心は常に軌道面内にある必要があるため、衛星が軌道を北上する途中で赤道を通過する軌道上の点は昇交点であり、衛星が南下する途中で赤道を通過する軌道上の点は 降交点 です。赤道上のこれらの 2 つの点を通る線を引くと、ノードのラインが定義されます。
昇交点赤経(Ω) — RAAN は、GCRF X 軸と昇交点間の角度です。二体ケプラー伝播モデルを使用し、他の摂動力が存在しない場合は、RAAN は常に一定です。摂動がない場合、軌道は空間内で同じままで、春分点は GCRF の X 軸となり、昇交点は移動しません。つまり、RAAN は同じままです。昇赤経(RAAN)の回転は、0°から360°までの任意の数値になります。
昇交点経度 (LAN) (静止衛星の場合は LAN) は、地理的な経度、または国際地球基準座標系 (IRTF) の x 軸と昇交点の間の角度を指します。LAN では、X 軸は赤道とグリニッジ子午線を通る線です。LAN を計算するには、
RAAN - GMSTを使用することもできます。ここで、GMST はグリニッジ子午線恒星時です。地球が回転すると、この X 軸も一緒に回転します。そして LAN は一定ではありません。静止衛星の場合、宇宙機が昇交点に戻る頃には、X 軸も元の位置に戻るため、LAN は一定として表示されます。
残りの 2 つの要素は次のとおりです。
近点引数(ω) — 軌道面における楕円の向き。昇交点から近点までの範囲で測定された角度。[0, 360)。
真近点 (v) — 特定の時刻における楕円軌道上の周回する物体の位置。衛星の軌道上の位置は近点から反時計回りに測定され、真近点角、ν (範囲[0, 360) と呼ばれます。
2 行要素 (TLE) ファイル
Aerospace Toolbox satellite 関数は、 TLEファイルを入力として受け入れます。TLEファイルをダウンロードするには、Space track の Web サイトを参照してください。
TLEセットは、特定の時点、元期 における地球を周回する物体の軌道要素のリストをエンコードするデータ形式です。軌道要素パラメーターは、さまざまな形式のテキストとしてエンコードできます。最も一般的な形式は、アメリカ航空宇宙局 (NASA) または北米航空宇宙防衛司令部 (NORAD) のTLE形式です。この形式では、各衛星には 3 つの行があります。最初の行には衛星の名前が含まれ、次の 2 行は標準のTLEです。
この例に示すように、各衛星のデータは 3 行で構成されます。
Satellite 1 1 25544U 98067A 04236.56031392 .00020137 00000-0 16538-3 0 9993 2 25544 51.6335 344.7760 0007976 126.2523 325.9359 15.70406856328906
行 1 は 11 文字の衛星名です。
行 2 と 3 は、NORAD および NASA で使用されるものと同一の標準TLEセット形式です。
この表は行 2 の列について説明します。
コラム 説明 例 1 行番号
13~7 衛星番号
255448 エルセット分類
U10~17 国際指定子
98067A19~32 要素セットの元期(UTC)
04236.5603139234~43 平均運動の時間に関する一次微分
.0002013745~52 平均運動の時間に関する2次微分(小数点あり)
00000-054~61 BSTAR抗力用語
16538-363 要素セットタイプ
065~68 要素番号
99969 チェックサム(モジュロ10)
3この表は行 3 の列について説明します。
コラム 説明 例 1 要素データの行番号
23~7 衛星番号
255449–16 傾斜角(度)
51.633518~25 昇交点の赤経(度)
344.776027~33 離心率(小数点以下を想定)
000797635~42 近地点引数(度)
126.252344~51 平均近点角(度)
325.935953~63 平均運動量(1日あたりの回転数)
15.7040685664~68 元期での回転数(回転数)
3289069 チェックサム(モジュロ10)
6
アプリケーションとオブジェクトの軌道によっては、30 日以上前の TLE から得られたデータは信頼できなくなる可能性があります。Simplified General Perturbations-4 (SGP4) アルゴリズムと Simplified 深宇宙 Perturbations-4 (SDP4) アルゴリズムを使用して、TLE から軌道位置を計算します。
システム有効性モデル(SEM)アルマナック
Aerospace Toolbox satellite 関数は、SEM アルマナックファイルを入力として受け入れます。SEM ファイルをダウンロードするには、https://www.navcen.uscg.gov/gps-nanus-almanacs-opsadvisories-sof Web サイトを参照してください。
アルマナックファイルは、 GPSやその他の衛星ナビゲーション システムが衛星を見つけて使用するために使用する簡略化されたガイドです。これらのファイルには、コンスタレーション内の各衛星の位置と状態に関する基本情報が含まれています。アルマナックファイルは、 TLEファイルほど詳細でも正確でもありません。しかし、アルマナックファイルのデータは定期的に更新され、この情報が最新の状態に保たれ、世界中で効率的なナビゲーションと通信をサポートします。アルマナックファイルの SEM 形式は、主にソフトウェア ツールの入力として使用されます。
軌道平均要素メッセージ (OMM) ファイル
Aerospace Toolbox は、satellite への入力として Orbit Mean-Elements Message (OMM) ファイルを受け入れます。OMM ファイルは、宇宙データシステム諮問委員会 ( CCSDS ) によって開発された軌道データ メッセージ (ODM) 推奨標準CCSDS 502.0-B-2 の一部です。OMM ファイルを使用すると、標準クエリを使用して一般摂動 (GP) データにアクセスできます。OMM ファイルをダウンロードするには、Space track または CelesTrak の Web サイトにアクセスしてください。Aerospace Toolbox は、.XML および .JSON OMM ファイル形式をサポートしています。
OMM ファイル形式は CelesTrak® によって定義されています。詳細については、軌道データ メッセージを参照してください。
Aerospace Toolbox は、OMM ファイルのこれらのフィールドを使用します。その他のフィールドはすべて無視されます。
| 述語 | 説明 | 例 |
|---|---|---|
| 衛星の名前。 |
|
| 平均要素理論。この値は |
|
| ケプラーの要素の元期を平均します。 |
|
| 平均動作(回転数/日)。 |
|
| 離心率。 |
|
| 傾斜角(度)。 |
|
| 昇交点赤経(度)。 |
|
| 近点引数(度)。 |
|
| 平均近点角(度)。 |
|
| NORADカタログ番号(衛星番号)。 |
|
| SGP/ SGP4 の抗力係数(1/地球半径)。 |
|
参照
[1] “Basics of Space Flight” https://solarsystem.nasa.gov/basics/chapter5-1/.
[2] “CelesTrak. Frequently Asked Questions: Two-Line Element Set Format.” Accessed March 26, 2016. https://celestrak.com/columns/v04n03/.
参考
オブジェクト
関数
show|play|hide|satellite|access|groundStation|satelliteScenarioViewer|conicalSensor