このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
HL-20 に飛行計器ブロックを適用
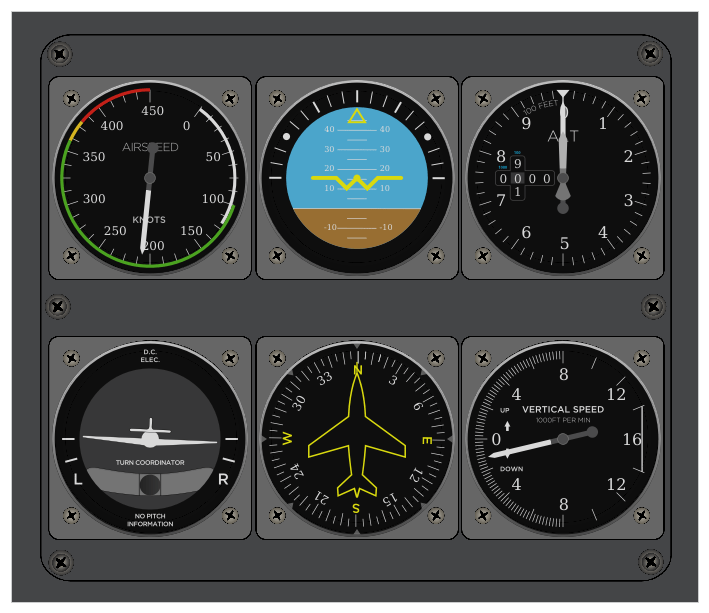
この例では、Simulink ® および Aerospace Blockset ™ ソフトウェアでモデル化された NASA の HL-20 リフティング ボディとコントローラーを示します。このサンプルモデルは、自動着陸コントローラーを使用して進入および着陸飛行フェーズをシミュレートします。可視化サブシステムは、Aerospace Blockset 飛行計器ライブラリの航空機固有のゲージを使用します。
HL-20 は、有人打ち上げシステム (PLS) としても知られ、スペース シャトル オービターを補完するために設計されたリフティング ボディの再突入機体です。HL-20揚力体は最大10人の乗員とごく少量の貨物[1]を運ぶように設計されており、ブースターロケットで垂直に打ち上げられるか、スペースシャトルオービターのペイロードベイで輸送されて軌道上に投入される予定だった。HL-20 リフティング ボディは、搭載された推進システムによって動力による軌道離脱が達成されるように設計されており、再突入は機首を先にして水平に、動力なしで行われることになっていた。
HL-20 リフティング ボディは、低地球軌道への往復のための低コストのソリューションとして開発されました。HL-20 の提案された利点は、着陸と発進の間の迅速なターンアラウンドによる運用コストの削減、飛行安全性の向上、および滑走路への従来の着陸能力です。HL-20 の潜在的なシナリオとしては、軌道上で取り残された宇宙飛行士の救助、スペースシャトルのオービターが利用できない場合の国際宇宙ステーションの乗組員交換、観測ミッション、衛星整備ミッションなどがある。
mdl = "HL20Gauges";
open_system(mdl);




HL-20に関する追加情報
[1] Jackson E. B.、Cruz C. L.、「HL-20 リフティング ボディのシミュレーション研究のための予備的亜音速空力モデル」、NASA TM4302(1992年8月)