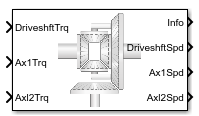
Open Differential
遊星かさ歯車としてのデファレンシャル
ライブラリ:
Powertrain Blockset /
Drivetrain /
Final Drive Unit
Vehicle Dynamics Blockset /
Powertrain /
Drivetrain /
Final Drive Unit
説明
Open Differential ブロックは、遊星かさ歯車列としてデファレンシャルを実装します。ブロックは、駆動軸かさ歯車と冠 (内歯) かさ歯車を一致させます。以下を指定できます。
キャリアと駆動軸の比率
冠歯車の位置
車軸とキャリアの粘性および減衰係数
Open Differential ブロックは、次の目的で使用します。
後部トランスミッションの駆動軸を車輪軸またはユニバーサル ジョイントと動的に結合する
最適なトラクション制御にパッシブまたはアクティブなトルク ベクタリングが不要な場合の、簡略化された、または従来型のドライブトレインをモデル化する
汎用のギアボックスと動力伝達装置のシナリオで、機械動力の分割をモデル化する
このブロックは、ハードウェアインザループ (HIL) および最適化のワークフローでの使用に適しています。すべてのパラメーターが調整可能です。
このブロックでは、標準的なエンジン、トランスミッション、およびデファレンシャルの構成について、タイヤと車両の正の運動を出力する座標系が使用されます。矢印は正の運動を示します。
効率
このブロックの効率を考慮するには、[効率係数] パラメーターを使用します。次の表は、各設定でのブロックの実装をまとめています。
| 設定 | 実装 |
|---|---|
| [定数効率係数、eta] パラメーターを使用して設定できる定数効率。 |
| 基準ギアの入力トルク、気温、および駆動軸の角速度の関数としての効率。次のパラメーターを使用して、ルックアップ テーブルとブレークポイントを指定します。
気温については、次のいずれかを使用できます。
内挿法を選択するには、[内挿法] パラメーターを選択します。詳細については、内挿法を参照してください。 |
動力の考慮
動力を考慮するために、このブロックは次の式を実装します。
| バス信号 | 説明 | 式 | ||
|---|---|---|---|---|
|
|
| 駆動軸からの機械動力 | |
| 車軸 1 からの機械動力 | |||
| 車軸 2 からの機械動力 | |||
|
|
| 合計動力損失 | ||
| 減衰による動力損失 | |||
|
|
| 保存されている内部エネルギーの変化率 | ||
運動
Open Differential ブロックは、冠歯車、左車軸、および右車軸の機械的な動的応答を表す次の微分方程式を実装します。
| 機械的な動的応答 | 微分方程式 |
|---|---|
| 冠歯車 |
|
| 左車軸 |
|
| 右車軸 |
|
Open Differential ブロックでは、冠歯車と車軸が剛結合していると仮定されます。次の拘束方程式が適用されます。
式では次の変数を使用します。
| N | キャリアと駆動軸とのギア比 |
| Jd | 冠歯車アセンブリの回転慣性 |
| bd | 冠歯車の線形粘性減衰 |
| ωd | 駆動軸の角速度 |
| η | デファレンシャルの効率 |
| J1 | 車軸 1 の回転慣性 |
| b1 | 車軸 1 の線形粘性減衰 |
| ω1 | 車軸 1 の角速度 |
| J2 | 車軸 2 の回転慣性 |
| b2 | 車軸 2 の線形粘性減衰 |
| ω2 | 車軸 2 の角速度 |
| Td | 駆動軸のトルク |
| T1 | 車軸 1 のトルク |
| T2 | 車軸 2 のトルク |
| Ti | 駆動軸の内部抵抗トルク |
| Ti1 | 車軸 1 の内部抵抗トルク |
| Ti2 | 車軸 2 の内部抵抗トルク |
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2017a で導入