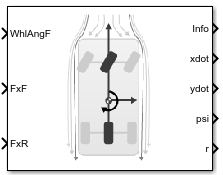
Bicycle Model
縦方向運動、横方向運動、ヨー運動を計算するためのシングル トラック (二輪) 3DOF 剛体車体の実装
ライブラリ:
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Vehicle Dynamics Blockset /
Vehicle Body
説明
メモ
Bicycle Model ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
Bicycle Model ブロックは、縦方向運動、横方向運動、およびヨー運動を計算するための剛体の 2 車軸シングル トラック (二輪) 車体を実装します。このブロックでは、車体の質量、空力抵抗、および加速とステアリングによる車軸間の重量分散が考慮されます。Bicycle Model ブロックは 2 種類あります。
| ブロック | 実装 |
|---|---|
Bicycle Model - Velocity Input |
|
Bicycle Model - Force Input |
|


前車軸と後車軸にかかる垂直抗力を計算するために、ブロックは剛体車両運動、サスペンション システムの力、および空気抗力を使用します。ブロックは力とモーメントの成分を剛体車体の座標系に分解します。
端子
入力
前輪角度 (rad 単位)。
車両固定の x 軸に沿って前車軸にかかる縦方向の力 FxF (N 単位)。
Bicycle Model - Force Input ブロックの入力端子。
車両固定の x 軸に沿って後車軸にかかる縦方向の力 FxR (N 単位)。
Bicycle Model - Force Input ブロックの入力端子。
車両固定の "x" 軸に沿った車両 CG の速度 (m/s 単位)。
Bicycle Model - Velocity Input ブロックの入力端子。
出力
次のブロック値を含むバス信号。
| 信号 | 説明 | 値 | 単位 | |||||
|---|---|---|---|---|---|---|---|---|
InertFrm | Cg | Disp | X | 地球固定の "X" 軸に沿った車両 CG の変位 | 計算 | m | ||
Y | 地球固定の "Y" 軸に沿った車両 CG の変位 | 計算 | m | |||||
Z | 地球固定の "Z" 軸に沿った車両 CG の変位 | 0 | m | |||||
Vel | Xdot | 地球固定の "X" 軸に沿った車両 CG の速度 | 計算 | m/s | ||||
Ydot | 地球固定の "Y" 軸に沿った車両 CG の速度 | 計算 | m/s | |||||
Zdot | 地球固定の "Z" 軸に沿った車両 CG の速度 | 0 | m/s | |||||
Ang | phi | 地球固定の "X" 軸を中心とする車両固定座標系の回転 (ロール) | 0 | rad | ||||
theta | 地球固定の "Y" 軸を中心とする車両固定座標系の回転 (ピッチ) | 0 | rad | |||||
psi | 地球固定の "Z" 軸を中心とする車両固定座標系の回転 (ヨー) | 計算 | rad | |||||
FrntAxl | Disp | X | 地球固定の "X" 軸に沿った前輪の変位 | 計算 | m | |||
Y | 地球固定の "Y" 軸に沿った前輪の変位 | 計算 | m | |||||
Z | 地球固定の "Z" 軸に沿った前輪の変位 | 0 | m | |||||
Vel | Xdot | 地球固定の "X" 軸に沿った前輪の速度 | 計算 | m/s | ||||
Ydot | 地球固定の "Y" 軸に沿った前輪の速度 | 計算 | m/s | |||||
Zdot | 地球固定の "Z" 軸に沿った前輪の速度 | 0 | m/s | |||||
RearAxl | Disp | X | 地球固定の "X" 軸に沿った後輪の変位 | 計算 | m | |||
Y | 地球固定の "Y" 軸に沿った後輪の変位 | 計算 | m | |||||
Z | 地球固定の "Z" 軸に沿った後輪の変位 | 0 | m | |||||
Vel | Xdot | 地球固定の "X" 軸に沿った後輪の速度 | 計算 | m/s | ||||
Ydot | 地球固定の "Y" 軸に沿った後輪の速度 | 計算 | m/s | |||||
Zdot | 地球固定の "Z" 軸に沿った後輪の速度 | 0 | m/s | |||||
Hitch | Disp | X | 地球固定の "X" 軸に沿った車軸平面からのヒッチのオフセット | 計算 | m | |||
Y | 地球固定の "Y" 軸に沿った車軸平面からのヒッチのオフセット | 計算 | m | |||||
Z | 地球固定の "Z" 軸に沿った車軸平面からのヒッチのオフセット | 計算 | m | |||||
Vel | Xdot | 地球固定の "X" 軸に沿った車軸平面からのヒッチのオフセット速度 | 計算 | m | ||||
Ydot | 地球固定の "Y" 軸に沿った中心平面からのヒッチのオフセット速度 | 計算 | m | |||||
Zdot | 地球固定の "Z" 軸に沿った車軸平面からのヒッチのオフセット速度 | 計算 | m | |||||
Geom | Disp | X | 地球固定の "X" 軸に沿った車軸平面からの車両シャシーのオフセット | 計算 | m | |||
Y | 地球固定の "Y" 軸に沿った中心平面からの車両シャシーのオフセット | 計算 | m | |||||
Z | 地球固定の "Z" 軸に沿った車軸平面からの車両シャシーのオフセット | 計算 | m | |||||
Vel | Xdot | 地球固定の "X" 軸に沿った車両シャシーのオフセット速度 | 計算 | m/s | ||||
Ydot | 地球固定の "Y" 軸に沿った車両シャシーのオフセット速度 | 計算 | m/s | |||||
Zdot | 地球固定の "Z" 軸に沿った車両シャシーのオフセット速度 | 計算 | m/s | |||||
BdyFrm | Cg | Vel | xdot | 車両固定の "x" 軸に沿った車両 CG の速度 | 計算 | m/s | ||
ydot | 車両固定の "y" 軸に沿った車両 CG の速度 | 計算 | m/s | |||||
zdot | 車両固定の "z" 軸に沿った車両 CG の速度 | 0 | m/s | |||||
Ang | Beta | 車体のスリップ角、β
| 計算 | rad | ||||
AngVel | p | 車両固定の "x" 軸を中心とする車両の角速度 (ロール レート) | 0 | rad/s | ||||
q | 車両固定の "y" 軸を中心とする車両の角速度 (ピッチ レート) | 0 | rad/s | |||||
r | 車両固定の "z" 軸を中心とする車両の角速度 (ヨー レート) | 計算 | rad/s | |||||
Acc | ax | 車両固定の "x" 軸に沿った車両 CG の加速度 | 計算 | gn | ||||
ay | 車両固定の "y" 軸に沿った車両 CG の加速度 | 計算 | gn | |||||
az | 車両固定の "z" 軸に沿った車両 CG の加速度 | 0 | gn | |||||
xddot | 車両固定の "x" 軸に沿った車両 CG の加速度 | 計算 | m/s^2 | |||||
yddot | 車両固定の "y" 軸に沿った車両 CG の加速度 | 計算 | m/s^2 | |||||
zddot | 車両固定の "z" 軸に沿った車両 CG の加速度 | 0 | m/s^2 | |||||
AngAcc | pdot | 車両固定の "x" 軸を中心とする車両の角加速度 | 0 | rad/s | ||||
qdot | 車両固定の "y" 軸を中心とする車両の角加速度 | 0 | rad/s | |||||
rdot | 車両固定の "z" 軸を中心とする車両の角加速度 | 計算 | rad/s | |||||
DCM | 方向余弦行列 | 計算 | rad | |||||
Forces | Body | Fx | 車両固定の "x" 軸に沿って車両 CG にかかる合力 | 計算 | N | |||
Fy | 車両固定の "y" 軸に沿って車両 CG にかかる合力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って車両 CG にかかる合力 | 0 | N | |||||
Ext | Fx | 車両固定の "x" 軸に沿って車両 CG にかかる外力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿って車両 CG にかかる外力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って車両 CG にかかる外力 | 0 | N | |||||
Hitch | Fx | 車両固定の "x" 軸に沿って、車体のヒッチ位置にかかるヒッチ力 | 入力 | N | ||||
Fy | 車両固定の "y" 軸に沿って、車体のヒッチ位置にかかるヒッチ力 | 入力 | N | |||||
Fz | 車両固定の "z" 軸に沿って、車体のヒッチ位置にかかるヒッチ力 | 入力 | N | |||||
FrntAxl | Fx | 車両固定の "x" 軸に沿って前輪にかかる縦方向の力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿って前輪にかかる横方向の力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って前輪にかかる垂直抗力 | 計算 | N | |||||
RearAxl | Fx | 車両固定の "x" 軸に沿って後輪にかかる縦方向の力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿って後輪にかかる横方向の力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って後輪にかかる垂直抗力 | 計算 | N | |||||
Tires | FrntTire | Fx | 車両固定の "x" 軸に沿ったフロント タイヤの力 | 計算 | N | |||
Fy | 車両固定の "y" 軸に沿ったフロント タイヤの力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿ったフロント タイヤの力 | 計算 | N | |||||
RearTire | FxFx | 車両固定の "x" 軸に沿ったリア タイヤの力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿ったリア タイヤの力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿ったリア タイヤの力 | 計算 | N | |||||
Drag | Fx | 車両固定の "x" 軸に沿って車両 CG にかかる抗力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿って車両 CG にかかる抗力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って車両 CG にかかる抗力 | 計算 | N | |||||
Grvty | Fx | 車両固定の "x" 軸に沿って車両 CG にかかる重力 | 計算 | N | ||||
Fy | 車両固定の "y" 軸に沿って車両 CG にかかる重力 | 計算 | N | |||||
Fz | 車両固定の "z" 軸に沿って車両 CG にかかる重力 | 計算 | N | |||||
Moments | Body | Mx | 車両固定の "x" 軸を中心とする車両 CG の車体モーメント | 0 | N·m | |||
My | 車両固定の "y" 軸を中心とする車両 CG の車体モーメント | 計算 | N·m | |||||
Mz | 車両固定の "z" 軸を中心とする車両 CG の車体モーメント | 0 | N·m | |||||
Drag | Mx | 車両固定の "x" 軸を中心とする車両 CG の抗力モーメント | 0 | N·m | ||||
My | 車両固定の "y" 軸を中心とする車両 CG の抗力モーメント | 計算 | N·m | |||||
Mz | 車両固定の "z" 軸を中心とする車両 CG の抗力モーメント | 0 | N·m | |||||
Ext | Mx | 車両固定の "x" 軸を中心とする車両 CG の外部モーメント | 0 | N·m | ||||
My | 車両固定の "y" 軸を中心とする車両 CG の外部モーメント | 計算 | N·m | |||||
Mz | 車両固定の "z" 軸を中心とする車両 CG の外部モーメント | 0 | N·m | |||||
Hitch | Mx | ヒッチ位置における、車両固定の "x" 軸を中心とするヒッチ モーメント | 0 | N·m | ||||
My | ヒッチ位置における、車両固定の "y" 軸を中心とするヒッチ モーメント | 計算 | N·m | |||||
Mz | ヒッチ位置における、車両固定の "z" 軸を中心とするヒッチ モーメント | 0 | N·m | |||||
FrntAxl | Disp | x | 車両固定の "x" 軸に沿った前輪の変位 | 計算 | m | |||
y | 車両固定の "y" 軸に沿った前輪の変位 | 計算 | m | |||||
z | 車両固定の "z" 軸に沿った前輪の変位 | 計算 | m | |||||
Vel | xdot | 車両固定の "x" 軸に沿った前輪の速度 | 計算 | m/s | ||||
ydot | 車両固定の "y" 軸に沿った前輪の速度 | 計算 | m/s | |||||
zdot | 車両固定の "z" 軸に沿った前輪の速度 | 0 | m/s | |||||
Steer | WhlAngFL | 左前輪ステアリング角度 | 計算 | rad | ||||
WhlAngFR | 右前輪ステアリング角度 | 計算 | rad | |||||
RearAxl | Disp | x | 車両固定の "x" 軸に沿った後輪の変位 | 計算 | m | |||
y | 車両固定の "y" 軸に沿った後輪の変位 | 計算 | m | |||||
z | 車両固定の "z" 軸に沿った後輪の変位 | 計算 | m | |||||
Vel | xdot | 車両固定の "x" 軸に沿った後輪の速度 | 計算 | m/s | ||||
ydot | 車両固定の "y" 軸に沿った後輪の速度 | 計算 | m/s | |||||
zdot | 車両固定の "z" 軸に沿った後輪の速度 | 0 | m/s | |||||
Steer | WhlAngRL | 左後輪ステアリング角度 | 計算 | rad | ||||
WhlAngRR | 右後輪ステアリング角度 | 計算 | rad | |||||
Hitch | Disp | x | 車両固定の "x" 軸に沿った車軸平面からのヒッチのオフセット | 入力 | m | |||
y | 車両固定の "y" 軸に沿った中心平面からのヒッチのオフセット | 入力 | m | |||||
z | 地球固定の "z" 軸に沿った車軸平面からのヒッチのオフセット | 入力 | m | |||||
Vel | xdot | 車両固定の "x" 軸に沿ったヒッチのオフセット速度 | 計算 | m/s | ||||
ydot | 車両固定の "y" 軸に沿ったヒッチのオフセット速度 | 計算 | m/s | |||||
zdot | 車両固定の "z" 軸に沿ったヒッチのオフセット速度 | 計算 | m/s | |||||
Pwr | Ext | 加えられる外部動力 | 計算 | W | ||||
Hitch | ヒッチによる動力損失 | 計算 | W | |||||
Drag | 抗力による動力損失 | 計算 | W | |||||
Geom | Disp | x | 車両固定の "x" 軸に沿った車軸平面からの車両シャシーのオフセット | 入力 | m | |||
y | 車両固定の "y" 軸に沿った中心平面からの車両シャシーのオフセット | 入力 | m | |||||
z | 地球固定の "z" 軸に沿った車軸平面からの車両シャシーのオフセット | 入力 | m | |||||
Vel | xdot | 車両固定の "x" 軸に沿った車両シャシーのオフセット速度 | 計算 | m/s | ||||
ydot | 車両固定の "y" 軸に沿った車両シャシーのオフセット速度 | 計算 | m/s | |||||
zdot | 車両固定の "z" 軸に沿った車両シャシーのオフセット速度 | 0 | m/s | |||||
Ang | Beta | 車体のスリップ角、β
| 計算 | rad | ||||
| 信号 | 説明 | 値 | 単位 | |||
|---|---|---|---|---|---|---|
PwrInfo | PwrTrnsfrd | PwrFxExt | 外部から加えられる縦方向の動力 | 計算 | W | |
PwrFyExt | 外部から加えられる横方向の動力 | 計算 | W | |||
PwrMzExt | 外部から加えられるロール モーメントによる動力 | 計算 | W | |||
PwrFwFx | 前車軸に加えられる縦方向の動力 | 計算 | W | |||
PwrFwFy | 前車軸に加えられる横方向の動力 | 計算 | W | |||
PwrFwRx | 後車軸に加えられる縦方向の動力 | 計算 | W | |||
PwrFwRy | 後車軸に加えられる横方向の動力 | 計算 | W | |||
PwrNotTrnsfrd | PwrFxDrag | 抗力による縦方向の動力 | 計算 | W | ||
PwrFyDrag | 抗力による横方向の動力 | 計算 | W | |||
PwrMzDrag | 抗力のピッチ モーメントによる動力 | 計算 | W | |||
PwrStored | PwrStoredGrvty | 重力の位置エネルギーの変化率 | 計算 | W | ||
PwrStoredxdot | 縦方向の運動エネルギーの変化率 | 計算 | W | |||
PwrStoredydot | 横方向の運動エネルギーの変化率 | 計算 | W | |||
PwrStoredr | ヨー回転運動エネルギーの変化率 | 計算 | W | |||
車両固定の x 軸に沿った車両 CG の速度 (m/s 単位)。
車両固定の y 軸に沿った車両 CG の速度 (m/s 単位)。
地球固定の Z 軸を中心とする車両固定座標系の回転 (ヨー) (rad 単位)。
車両固定の z 軸を中心とする車両の角速度 r (ヨー レート) (rad/s 単位)。
パラメーター
縦方向
横方向
ヨー
空力
環境
シミュレーション
参照
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
拡張機能
C/C++ コード生成
Simulink® Coder™ を使用して C および C++ コードを生成します。
バージョン履歴
R2018a で導入Bicycle Model ブロックを含むモデルのシミュレーションには、Simulink 3D Animation が必要です。
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します:
また、以下のリストから Web サイトを選択することもできます。
最適なサイトパフォーマンスの取得方法
中国のサイト (中国語または英語) を選択することで、最適なサイトパフォーマンスが得られます。その他の国の MathWorks のサイトは、お客様の地域からのアクセスが最適化されていません。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)